systemcomposer.interface.PhysicalInterface
物理接口
描述
一个PhysicalInterface对象表示物理接口的结构。
创建
创建物理接口addPhysicalInterface函数。
interface = addPhysicalInterface(模型。InterfaceDictionary,“newPhysicalInterface”)
属性
对象的功能
addElement |
添加元素 |
getElement |
获取元素的对象 |
removeElement |
删除元素 |
setName |
设置值类型、函数参数、接口或元素的名称 |
setDescription |
为值类型或接口设置描述 |
applyStereotype |
将原型应用到架构模型元素 |
getStereotypes |
将原型应用于建筑模型的元素 |
getStereotypeProperties |
获取元素上的原型属性名 |
removeStereotype |
从模型元素中移除原型 |
getProperty |
获取应用于元素的原型对应的属性值 |
getPropertyValue |
获取建筑属性值 |
getEvaluatedPropertyValue |
从元素获取属性的评估值 |
setProperty |
设置属性值对应于应用到元素的原型 |
hasStereotype |
查找元素是否应用了原型 |
hasProperty |
查找元素是否具有属性 |
摧毁 |
移除模型元素 |
例子
以编程方式构建体系结构模型
使用System Composer™以编程方式构建架构模型。
构建模型
要构建模型,需要添加包含数据接口、数据元素、值类型和物理接口的数据字典,然后添加组件、端口和连接。创建带有构造型和属性的概要文件,然后将这些构造型应用于模型元素。为端口分配所属接口。在构建模型之后,您可以创建自定义视图来关注特定的考虑事项。您还可以根据指定的条件查询模型以收集不同的模型元素。
添加组件、端口、连接和接口
创建一个模型并提取它的架构。
模型= systemcomposer.createModel(“mobileRobotAPI”);arch = model.Architecture;
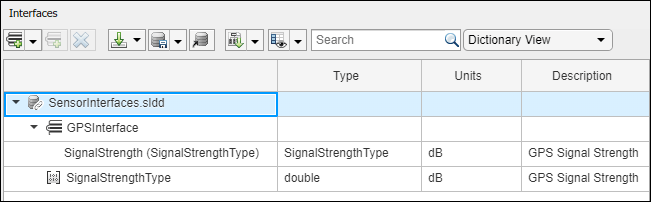
创建接口数据字典并添加数据接口。向数据接口添加数据元素。向接口数据字典中添加一个值类型。将数据元素的类型指定为值类型。添加具有物理域类型的物理接口和物理元素。将数据字典链接到模型。
字典= systemcomposer.createDictionary(“SensorInterfaces.sldd”);interface = dictionary.addInterface(“GPSInterface”);element = interface.addElement(“SignalStrength”);valueType = dictionary.addValueType“SignalStrengthType”单位=“数据库”、描述=“GPS信号强度”);element.setType (valueType);physicalInterface = dictionary.addPhysicalInterface(“PhysicalInterface”);physicalElement = addElement(物理接口,“ElectricalElement”类型=“electrical.electrical”);linkDictionary(模型,“SensorInterfaces.sldd”);
将修改保存到接口数据字典中。
dictionary.save
保存模型。
model.save
打开模型。
systemcomposer.openModel (“mobileRobotAPI”);
在“接口编辑器”中查看接口。
添加组件、端口和连接。将物理接口设置为物理端口,后续将连接物理端口。
componentSensor = addComponent(arch,“传感器”);sensorPorts = addPort(组件传感器。架构,{“MotionData”,“SensorPower”},{“在”,“物理”});sensorPorts(2).setInterface(physicalInterface) componentPlanning = addComponent(arch)“计划”);planningPorts = addPort(componentPlanning. port)架构,{“命令”,“SensorPower1”,“MotionCommand”},{“在”,“物理”,“出”});planningPorts(2).setInterface(physicalInterface) componentMotion = addComponent(arch)“运动”);motionPorts = addPort(组件运动。架构,{“MotionCommand”,“MotionData”},{“在”,“出”});
对象上创建拥有的接口“MotionData”端口。在所属数据接口下添加所属数据元素。赋值数据元素"旋转”到单位设置为的值类型度.
ownedInterface = motionPorts(2).createInterface(“DataInterface”);ownedElement = ownedInterface.addElement(“旋转”);subInterface = ownedElement.createOwnedType(单元=“度”);
在“接口编辑器”中查看接口。选择“MotionData”端口运动组件。在“接口编辑器”中,从字典视图来端口接口视图.

使用接口规则和默认名称规则连接组件。接口规则用于连接使用同一个接口的组件上的端口。缺省情况下,name规则连接名称相同的组件上的端口。
c_sensorData = connect(arch,componentSensor,componentPlanning,Rule=“界面”);c_motionData = connect(arch,componentMotion,componentSensor);c_motionCommand = connect(arch,componentPlanning,componentMotion);
添加和连接架构端口
在体系结构上添加体系结构端口。
archPort = addPort(arch,“命令”,“在”);
的连接命令需要一个组件端口作为参数。获取组件端口,然后进行连接。
compPort = getPort(componentPlanning,“命令”);c_Command = connect(archPort,compPort);
保存模型。
model.save
按排版面Ctrl + Shift +一个或者使用这个命令。
万博1manbetxSimulink.BlockDiagram.arrangeSystem (“mobileRobotAPI”);

创建并应用原型配置文件
概要文件是可以应用于任何模型的XML文件。您可以将带有属性的原型添加到概要文件中,然后用特定的值填充属性。与System Composer的内置分析功能一起,原型可以帮助您优化系统的性能、成本和可靠性。
创建概要文件并添加原型
创建配置文件。
systemcomposer.createProfile(“GeneralProfile”);
创建一个适用于所有元素类型的原型。
elemSType = addStereotype(配置文件,“projectElement”);
为不同类型的组件创建原型。您可以根据您的设计需求选择这些类型。
pCompSType = addStereotype(配置文件,“physicalComponent”AppliesTo =“组件”);sCompSType = addStereotype(配置文件,“softwareComponent”AppliesTo =“组件”);
为连接创建一个原型。
sConnSType = addStereotype(配置文件,“standardConn”AppliesTo =“连接器”);
添加属性
向原型添加属性。您可以使用属性来捕获模型元素的元数据,并分析非功能性需求。在任何导入概要文件的模型中,这些属性被添加到应用原型的所有元素中。
addProperty (elemSType“ID”类型=“uint8”);addProperty (elemSType“描述”类型=“字符串”);addProperty (pCompSType“成本”类型=“替身”单位=“美元”);addProperty (pCompSType“重量”类型=“替身”单位=“g”);addProperty (sCompSType“develCost”类型=“替身”单位=“美元”);addProperty (sCompSType“develTime”类型=“替身”单位=“小时”);addProperty (sConnSType“unitCost”类型=“替身””,单位=“美元”);addProperty (sConnSType“unitWeight”类型=“替身”单位=“g”);addProperty (sConnSType“长度”类型=“替身”单位=“m”);
保存配置文件
profile.save;
将概要文件应用于模型
将概要文件应用到模型。
applyProfile(模型,“GeneralProfile”);
将构造型应用于组件。一些组件是物理组件,而另一些是软件组件。
applyStereotype (componentPlanning“GeneralProfile.softwareComponent”) applyStereotype (componentSensor“GeneralProfile.physicalComponent”) applyStereotype (componentMotion“GeneralProfile.physicalComponent”)
将连接器原型应用于所有连接。
batchApplyStereotype(拱,“连接器”,“GeneralProfile.standardConn”);
将通用元素原型应用于所有连接器和端口。
batchApplyStereotype(拱,“组件”,“GeneralProfile.projectElement”);batchApplyStereotype(拱,“连接器”,“GeneralProfile.projectElement”);
为每个组件设置属性。
setProperty (componentSensor“GeneralProfile.projectElement.ID”,“001”);setProperty (componentSensor“GeneralProfile.projectElement.Description”,“所有传感器的中央单元”);setProperty (componentSensor“GeneralProfile.physicalComponent.Cost”,“200”);setProperty (componentSensor“GeneralProfile.physicalComponent.Weight”,“450”);setProperty (componentPlanning“GeneralProfile.projectElement.ID”,“002”);setProperty (componentPlanning“GeneralProfile.projectElement.Description”,“电脑”计划);setProperty (componentPlanning“GeneralProfile.softwareComponent.develCost”,“20000”);setProperty (componentPlanning“GeneralProfile.softwareComponent.develTime”,“300”);setProperty (componentMotion“GeneralProfile.projectElement.ID”,“003”);setProperty (componentMotion“GeneralProfile.projectElement.Description”,“电机和电机控制器”);setProperty (componentMotion“GeneralProfile.physicalComponent.Cost”,“4500”);setProperty (componentMotion“GeneralProfile.physicalComponent.Weight”,“2500”);
将连接的属性设置为相同。
connections = [c_sensorData c_motionData c_motionCommand c_Command];为k = 1:长度(连接)setProperty(连接(k)“GeneralProfile.standardConn.unitCost”,“0.2”);setProperty(连接(k),“GeneralProfile.standardConn.unitWeight”,“100”);setProperty(连接(k),“GeneralProfile.standardConn.length”,“0.3”);结束
添加层次结构
添加两个名为控制器而且范围在运动组件。定义端口。应用连接器原型,将组件连接到体系结构和彼此之间。体系结构图中的层次结构创建了额外的详细级别,指定组件在内部如何行为。
motionArch = componentMotion.Architecture;motionController = motionArch.addComponent(“控制器”);controllerPorts = addPort(动议控制器。架构,{“controlIn”,“controlOut”},{“在”,“出”});controllerCompPortIn = motionController.getPort(“controlIn”);controllerCompPortOut = motionController.getPort(“controlOut”);motionScope = motionArch.addComponent(“范围”);scopePorts = addPort(motionScope。架构,{“scopeIn”,“scopeOut”},{“在”,“出”});scopeCompPortIn = motionScope.getPort(“scopeIn”);scopeCompPortOut = motionScope.getPort(“scopeOut”);c_planningController = connect(motionPorts(1),controllerCompPortIn);
对于输出端口连接,必须指定数据元素。
c_planningScope = connect(scopeCompPortOut,motionPorts(2),“DestinationElement”,“旋转”);c_planningConnect = connect(controllerCompPortOut,scopeCompPortIn,“GeneralProfile.standardConn”);
保存模型。
model.save
按排版面Ctrl + Shift +一个或者使用这个命令。
万博1manbetxSimulink.BlockDiagram.arrangeSystem (“mobileRobotAPI /运动”);

创建模型参考
模型引用可以帮助您按层次结构组织大型模型,并一次性定义架构或行为,然后您就可以重用它们了。当一个组件引用另一个模型时,该组件上的任何现有端口都将被移除,而存在于被引用模型上的端口将出现在该组件上。
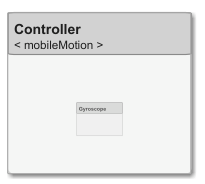
创建一个新的System Composer模型。转换控制器组件转换为引用组件以引用新模型。上添加其他端口控制器组件时,您必须更新引用的模型“mobileMotion”.
referenceModel = systemcomposer.createModel“mobileMotion”);referenceArch = referencmodel . architecture;newComponents = addComponent(引用搜索)“陀螺”);referenceModel。保存linkToModel (motionController,“mobileMotion”);
保存模型。
referenceModel。保存model.save
制作变型组件
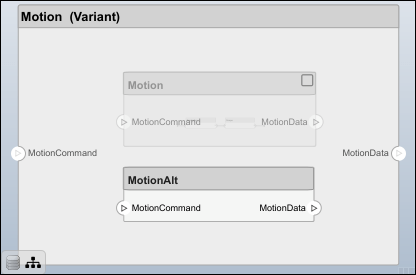
您可以将规划组件转换为变体组件makeVariant函数。原始组件被嵌入到变体组件中,作为可用的变体选择之一。您可以在变体组件中设计其他变体选择,并切换活动选择。可变组件允许您在架构模型中以编程方式选择行为设计,以执行贸易研究和分析。
[variantComp,choice1] = makeVariant(componentMotion);
添加一个名为Motion的附加变量选择Alt.第二个参数定义名称,第三个参数定义标签。标签表明了选择。主动选择由标签控制。
choice2 = addChoice(variantComp,{“MotionAlt”},{“MotionAlt”});
在运动上创建必要的端口Alt.
motionAltPorts = addPort(choice2.)架构,{“MotionCommand”,“MotionData”},{“在”,“出”});
做运动Alt主动变体。
setActiveChoice (variantComp“MotionAlt”)
按排版面Ctrl + Shift +一个或者使用这个命令。
万博1manbetxSimulink.BlockDiagram.arrangeSystem (“mobileRobotAPI /规划”);
保存模型。
model.save
清理
在再次运行此示例之前,运行此脚本以删除生成的工件。
cleanUpArtifacts
更多关于
版本历史
R2021b中引入
您也可以从以下列表中选择一个网站: