主要内容
来自运动和视觉猛击的结构
立体声视觉,三角测量,三维重建,以及视觉同步定位和映射(SLAM)
立体声愿景是通过比较同一场景的两个或多个视图从相机图像中恢复深度的过程。来自运动(SFM)的结构是从一组2-D图像估计场景的三维结构的过程。视觉同步定位和映射(VSLAM)是计算相机关于其周围环境的位置和方向的过程,同时映射环境。有关更多详细信息,请参阅Visual Slam概述和来自运动概述的结构。
突出显示主题
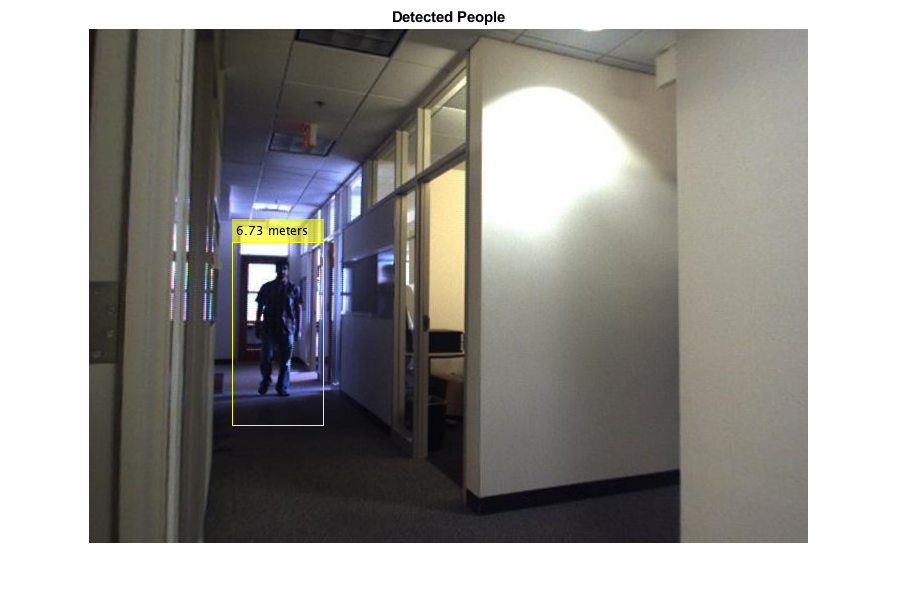
- 立体声愿景
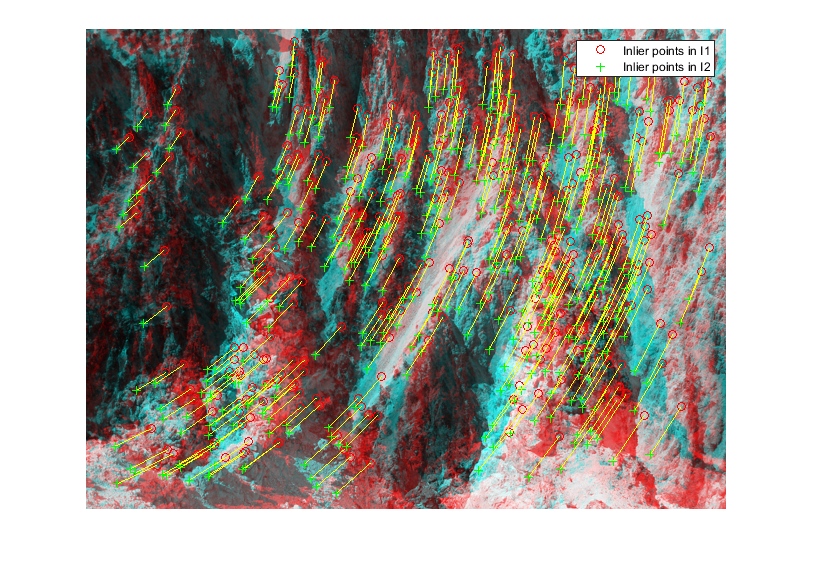
立体矫正,差异和密集的3-D重建 - 运动结构
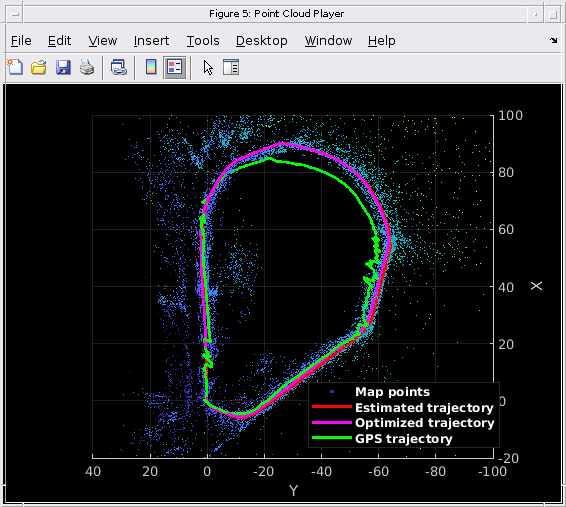
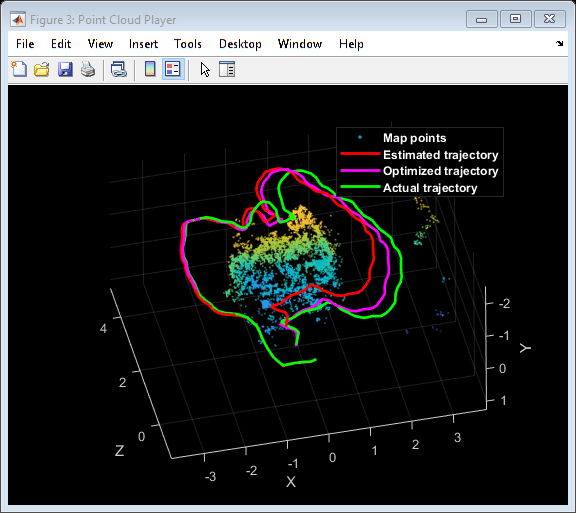
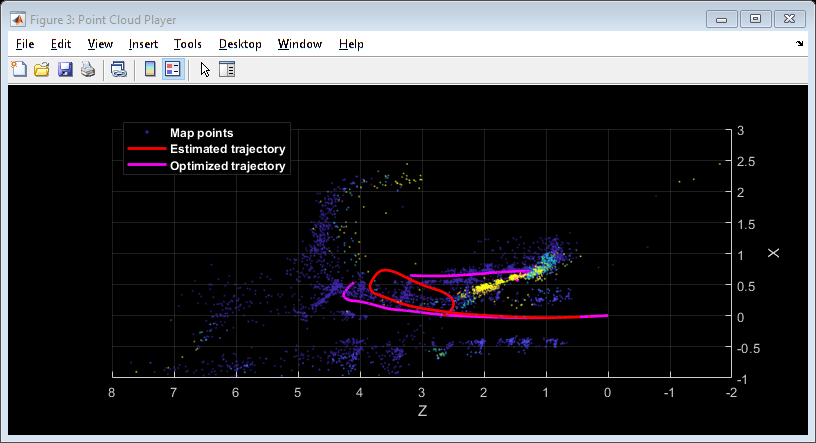
从多个视图中重建3-D重建 - 视觉同时定位和映射(vslam)
Visual Slam映射初始化,跟踪,本地映射,环路检测和漂移校正
特色例子
您还可以从以下列表中选择一个网站:
