激光雷达(光探测和测距的首字母缩写)是一种遥感技术,利用脉冲光收集对周围物体的距离测量。激光雷达传感器发射激光脉冲,反射物体,使它们能够感知周围环境的结构。传感器记录反射的光能,以确定到物体的距离,从而创建周围环境的2D或3D表示。
激光雷达传感器是自动驾驶和机器人应用的主要传感器之一。它们支持物体检测、语义分割等3D感知工作流程,以及绘图、同步定位和绘图(SLAM)和路径规划等导航工作流程。
自主系统在其传感器套件中使用多个传感器,如摄像机、IMU和雷达,用于环境感知。激光雷达可以克服其他传感器的一些缺点,提供高度精确的、结构的和三维的环境信息。这一优势促使激光雷达传感器进入主流感知市场。
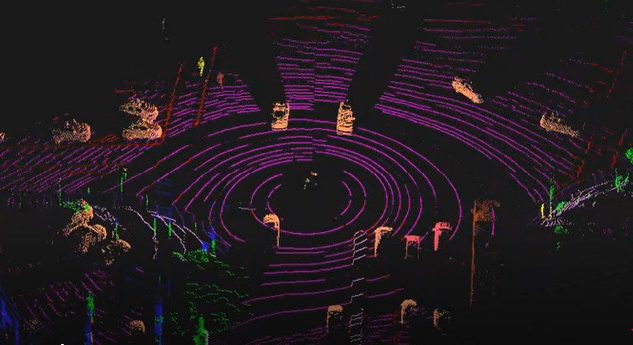
由安装在地面车辆上的激光雷达传感器收集的激光雷达数据。
市场对激光雷达的采用受到三个关键因素的推动:
- 低成本的激光雷达
低成本激光雷达的引入,增强了距离、尺寸和坚固性的特点,增加了该技术在收入相对较低的工业应用中的可用性。
- 精确的3 d数据
激光雷达收集周围环境的高密度三维信息点云具有比雷达和声纳等其他距离传感器更高的精度。这反过来又提高了三维重建的准确性。
- 激光雷达处理算法
激光雷达处理工作流程的最新进展,如语义分割、目标检测和跟踪、激光雷达摄像机数据融合和激光雷达SLAM,使工程团队能够将激光雷达添加到他们的开发工作流程中。您可以使用诸如MATLAB之类的工具®开发和应用激光雷达处理算法。

航空激光雷达传感器。
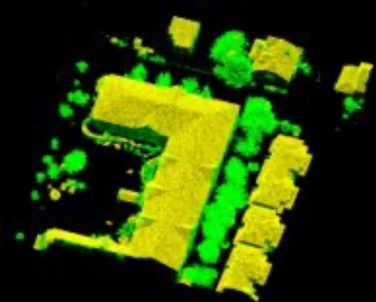
航空激光雷达数据。
航空激光雷达应用的例子包括:
- 农业:激光雷达技术在农业中广泛应用,用于绘制植被面积,确定农场和集水区的确切地形。
- 城市规划:激光雷达用于创建一个地区的数字地表模型(dms)甚至数字城市模型(dms),这些模型用于设计一个城市或在一个现有的城市中建造新的基础设施。
- 地质填图激光雷达可用于创建地球表面的3D地图,可进一步用于采矿、精密林业和石油和天然气勘探等应用。
- 空中导航与路径规划:激光雷达现在被用于无人机收集实时3D数据,以便在周围环境中自主导航。
地面激光雷达
地面激光雷达可以是静止的地面激光雷达和移动的激光雷达。

移动激光雷达传感器。
移动激光雷达数据。
- 固定地面激光雷达是安装在固定平台上的激光雷达。它们通常用于土地测量、道路测量、拓扑制图、创建数字高程图(dem)、农业和其他应用。静止地面激光雷达适用于需要详细和近距离数据采集的应用。
- 移动激光雷达是安装在移动平台上的地面激光雷达,比如汽车或卡车。最普遍的移动激光雷达应用是自动驾驶。安装在车辆上的激光雷达捕捉周围环境的3D点云数据,并进一步用于感知和导航工作流程。
室内激光雷达
激光雷达通过安装在移动机器人上而广泛应用于室内机器人应用。除了3D激光雷达,2D激光雷达或激光扫描仪也用于室内机器人应用,如激光雷达扫描和测绘。它们收集周围环境的深度信息,然后基于用例进行进一步处理。

室内激光雷达传感器。
室内激光雷达数据。
室内激光雷达的常见用途包括:
- 激光雷达测绘和SLAM:可以使用2D或3D激光雷达分别创建2D或3D SLAM和映射。
- 障碍物检测、碰撞预警和避障二维激光雷达被广泛用于探测障碍物。这些数据可以进一步用于创建碰撞警告或避免障碍物。
MATLAB和激光雷达工具箱™简化激光雷达处理任务。MATLAB利用专用的工具和功能,帮助您克服处理激光雷达数据的常见挑战,如3D数据类型、数据稀疏、数据中的无效点和高噪声。
您可以将实时和记录的激光雷达数据导入MATLAB,实现激光雷达处理工作流程,并创建C/ c++和CUDA代码部署到生产中。
MATLAB在处理激光雷达点云方面提供的一些重要功能包括:
流、读和写激光雷达数据
在MATLAB中处理任何传感器数据的第一步是将数据输入到MATLAB工作空间。您可以:
- 从Velodyne传感器采集实时数据Velodyne激光雷达硬件支持包万博1manbetx.
- 读取以不同文件格式存储的点云,如PCD、PLY、PCAP、Ibeo数据容器、LAS和LAZ。
- 在模拟环境中合成激光雷达数据,以测试处理算法。无人机的工具箱和自动驾驶工具箱™提供激光雷达传感器模型来模拟激光雷达点云。

来自Velodyne激光雷达传感器的实时激光雷达数据
激光雷达数据处理
你可以预处理激光雷达数据提高数据质量,从中提取基本信息。激光雷达工具箱提供向下采样、中值滤波、对齐、转换和从点云提取特征的功能。
激光雷达相机校正
MATLAB使激光雷达摄像机校准估计激光摄像机转换为融合摄像机和激光雷达数据。您可以进一步融合激光雷达点云中的颜色信息和使用来自同一位置的相机的2D边界框估计激光雷达中的3D边界框。
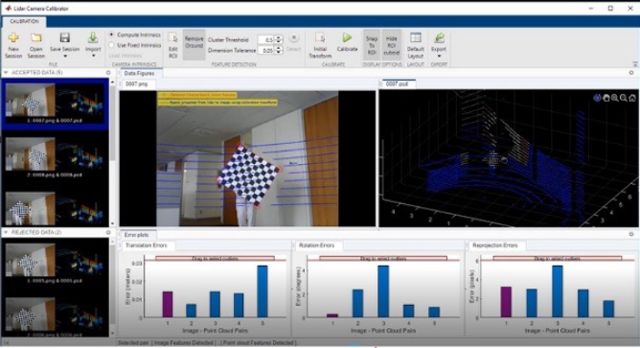
激光雷达相机校准应用程序。
激光雷达的深度学习
通过MATLAB,可以应用深度学习算法对激光雷达数据进行目标检测和语义分割。
- 只用MATLAB中的几行代码,就可以导入预先训练好的语义分割模型,包括PointSeg和SqueezeSegV2来分割激光雷达数据。您还可以培训、评估和部署自己的深度学习模型。
- MATLAB能够设计、训练和评估健壮的探测器,如PointPillars网络.您可以在激光雷达点云中检测和拟合物体周围的定向包围框。
- 的激光雷达贴标签机应用在Lidar工具箱简化点云标记。您可以手动添加包围框周围的对象,并应用内置或自定义算法自动化激光雷达点云标记和评估自动化算法性能。

点云的语义分割
基于点云的目标跟踪
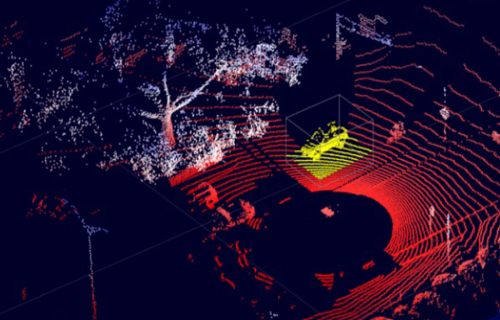
MATLAB可以统一多个领域,为端到端对象跟踪工作流提供信息。这使您能够读取激光雷达数据,预处理它,应用深度学习来检测对象,使用预定义的跟踪器跟踪这些对象,并将其部署到目标硬件上。
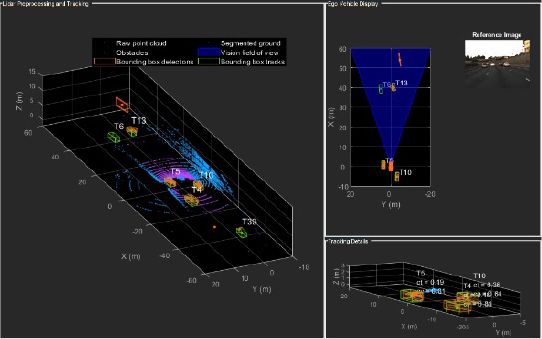
目标检测与跟踪。
点云配准和SLAM
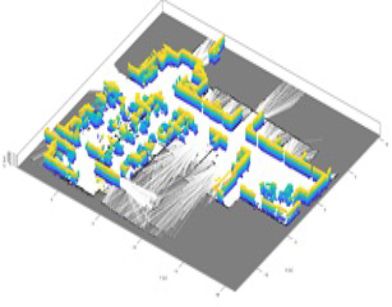
MATLAB提供了用SLAM算法配准激光雷达点云和构建三维地图的功能。从激光雷达点云中提取和匹配快速点特征直方图(FPFH)描述子,然后根据匹配的特征进行点云配准。
您还可以通过拼接地面和航空激光雷达数据的激光雷达点云序列来实现3D SLAM算法。

由激光雷达点云数据创建的地图。
例子和如何做
软件参考

30天的免费试用

问题吗?
你也可以从以下列表中选择一个网站: