ロボット工学向けMATLABおよび的Si万博1manbetxmulink
ロボティクスのアイデアやコンセプトを実世界の环境でシームレスに动作する自律型システムに転换

ロボティクスの研究者やエンジニアは,MATLABおよび的S万博1manbetximulinkをアルゴリズムの设计やチューニング,现実世界のシステムのモデリング,コードの自动生成などに使用し,そのすべてを単一のソフトウェア环境で行っています。
MATLABとSi万博1manbetxmulink的を使用すれば,次のことが可能になります。
- 开発したアルゴリズムでロボットに接続し,制御。
- ハードウェア非依存のアルゴリズムを开発し,机器人操作系统(ROS)に接続。
- さまざまなセンサーやアクチュエータに接続し,制御信号の送信や多様なデータの解析が可能。
- C / C ++,VHDL / Verilog的,ストラクチャードテキスト,CUDAをはじめとする多数の言语で,マイクロコントローラー,FPGA,可编程控制器,GPUなどの组み込みターゲット用コードを自动生成し,手作业によるコーディングを削减。
- 既成のハードウェアサポートパッケージを使用してArduino的や树莓派といった低コストハードウェアに接続。
- 共有可能なコードやアプリケーションを作成し,设计のレビューを简素化。
- レガシーコード使用して既存のロボティクステムと统合。

ロボティクス向け応用例をビデオで见る
一绪にやってみましょう。
必要な制品の评価版を入手して,モデルをダウンロードしてください。







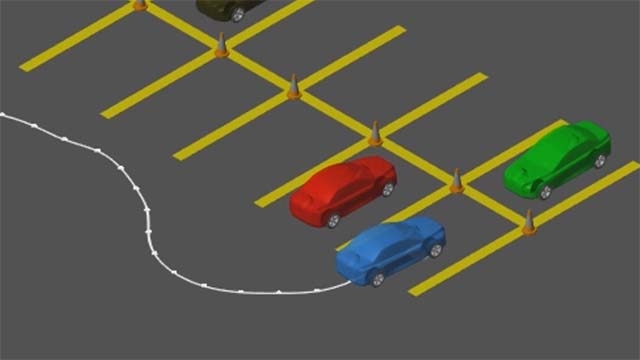
プランニングおよび意思决定
自己位置推定および环境地図作成(SLAM)により,激光雷达センサーデータを使用して环境マップを作成します。
制约的环境におけるナビゲーションは,パスおよび动作プランニング用アルゴリズムの设计により行います。パスプランナーを使用し,どのようなマップ上でも无障害のパスを计算します。
不确実性に直面した际,ロボットによる意思决定が可能なアルゴリズムを设计し,协调的环境で安全に动作を実行します。意思决定に必要な条件とアクションを定义するため,ステートマシンを実装します。
关连情报
制品を见る



他のプラットフォームおよびターゲットとの通信
CAN,EtherCAT的,802.11を含む复数のプロトコルを使用して,组み込みターゲットと通信します。デジタル,RF,その他のワイヤレス技术を使用して,TCP / IP,UDP,I2C,SPI,MODBUSおよび蓝牙シリアルプロトコル対応のハードウェアに接続します。
“MATLABおよび的S万博1manbetximulinkを使用すれば,制御アルゴリズムの开発,デバッグ,データ解析などのために复数のツールを切り替えるのではなく,単一の环境を使用できるのです。この统合机能により,プロジェクト开発全体の期间を短缩し,エラーの入り込む余地を削减できるのです“。
レンセラー工科大学约翰·文博士




MathWorks公司コンサルティングが迅速な立ち上げを支援
MathWorks公司コンサルティングはお客様と协力して,カスタマイズされた计画を策定し,立ち上げ直后のチームであっても,経験豊富なMATLAB 万博1manbetx/ Simulink的ユーザーで构成されたチームであってもプロジェクトの迅速な开発を支援いたします。パーソナライズされた习得支援と透明性の高いアプローチを通じて,プロセス,ツール,设计作业の改善を,お客様自身が遂行できるようなることを目标としています。

无料评価版を入手する
30日间の无料评価版はこちら

ご质问はこちらへ
ロボット工学の専门家にご相谈ください。