制御システム向けMATLABおよび仿真软万博1manbetx件
制御システムの設計,テスト,および実装
制御システムのエンジニアは,プラントモデリングから,制御アルゴリズムと監視ロジックの設計および調整,さらには自動コード生成とシステム検証,妥当性確認,テストを用いた導入に至るまで,開発の全段階でMATLAB®と仿万博1manbetx真软件®を利用します。MATLABと仿万博1manbetx真软件の特長は次のとおりです。
- ラントダイナミクスのモデリング,制御アルゴリズムの設計,閉ループシミュレーションを実行するマルチドメインブロック線図環境
- システム同定法または物理モデリングツールを利用したプラントモデリング
- 時間領域および周波数領域でオーバーシュート,立ち上がり時間,位相余裕,ゲイン余裕などのパフォーマンス特性や安定性特性を解析するための,あらかじめ用意されている機能と対話型ツール
- 根軌跡,ボード線図,等,LQG,ロバスト制御,モデル予測制御などの設計手法と解析手法
- PID,ゲインスケジューリング,および任意の输出およびMIMO制御システムの自動調整
- スケジューリング,モード切り替え,故障検出/分離/回復再構成(FDIR)を実行するための監視ロジックのモデリング,設計,シミュレーション
“当社では,MathWorksのモデルベースデザインツールを,制御アルゴリズムだけでなく物理ハードウェアのシミュレーションにも使用しています。制御ソフトウェアとテストベンチのコードが自動生成されるため,開発期間が短くなり,変更も迅速に実装できるようになりました。また,シミュレーションとテスト結果を可視化することで、自信を持って設計した制御アルゴリズムを量産品に組み込むことが可能になりました」
Astrium公司,大卫Gendre氏

制御システムへのMATLABおよび仿真软万博1manbetx件の利用


プラントダイナミクスのモデリングとシミュレーション
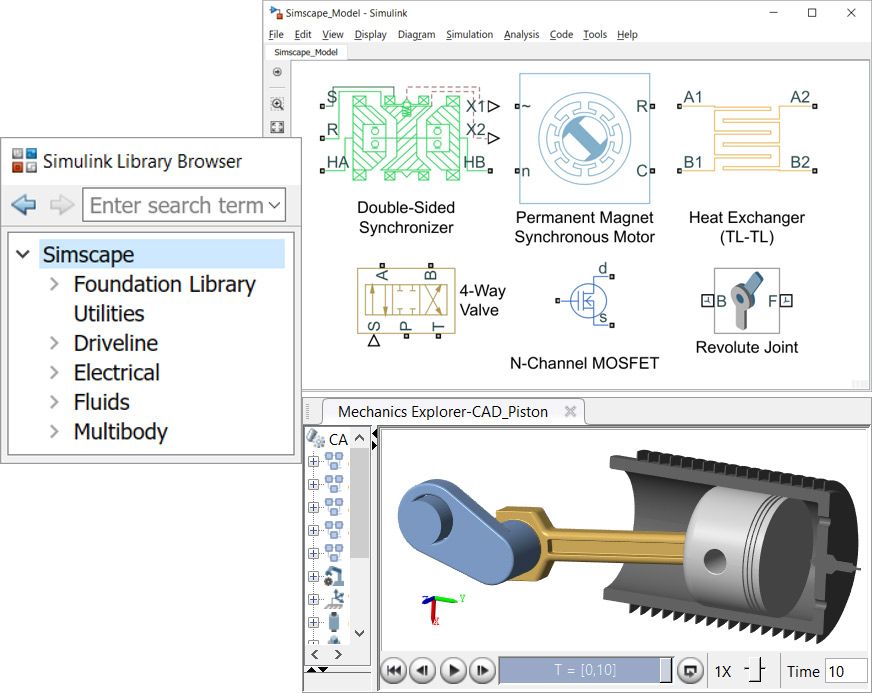
MATLABと仿真万博1manbetx软件を利用すると,正確なプラントモデルを作成できます。さまざまなモデリング手法を用いてプラントの複雑なダイナミクスを表現でき,プラント内の各コンポーネントに最適な手法でシステムレベルのプラントモデルを作成できます。
モデルの詳細な構造が不明な場合は,システム同定を用いて入出力データからプラントダイナミクスを推定できます。また,物理モデリングツールを使用すると,基礎的な第一原理方程式を導出せずに,複雑なマルチドメインプラントモデルを作成できます。機械式,電気式、磁気式,油圧式、空気圧式,熱式のコンポーネントを表現するブロックを使用して,システムにおけるコンポーネント配置や物理的接続関係のマッピングを実行できます。
関連情報
製品を見る

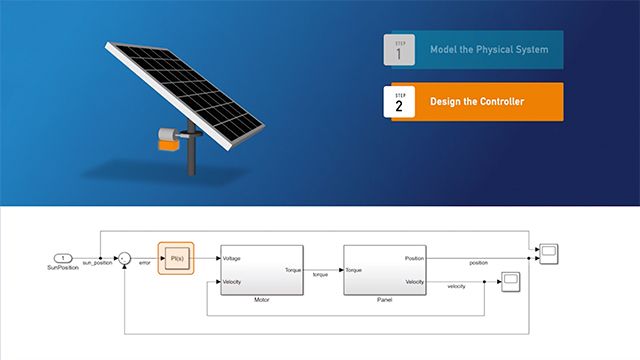
フィードバック補償器の設計と調整
閉ループ補償器の解析と開発,主要な性能パラメーター(オーバーシュート,立ち上がり時間,安定余裕など)の評価,非線形模型モ万博1manbetxデルのを平衡化とし線形化を行うことができます。また,不確定性がモデルの性能と安定性に及ぼす影響をモデリングおよびし解析することもできます。
ボード線図や根軌跡などの線形制御設計手法を利用して,シミュレーションモデル内やテストハードウェア上のPIDコントローラーを自動調整できます。あらかじめ用意されているツールを利用すると,分散型の多変数コントローラーを自動調整し,高度な制御手法(モデル予測制御やロバスト制御など)を用いることができます。最適化手法を用いると,立ち上がり時間やオーバーシュートの制約に合わせてを満たすようにコントローラーゲインを計算算出できます。
監視ロジックの設計とシミュレーション
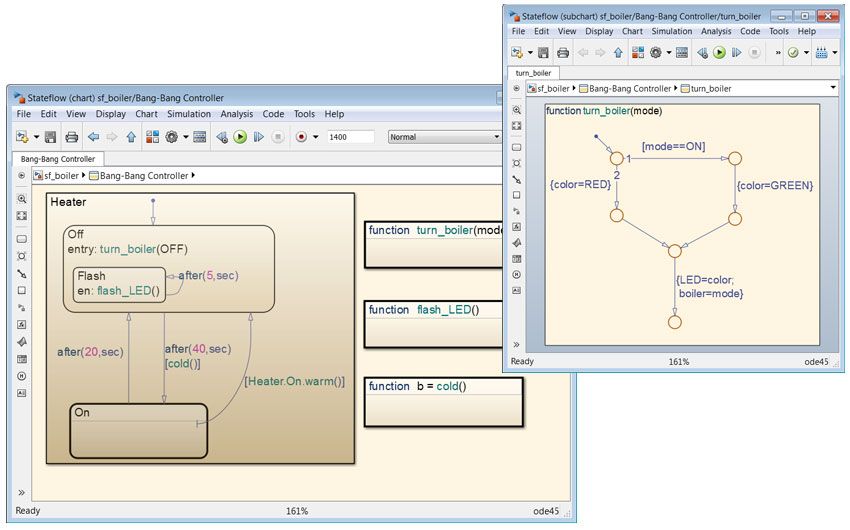
Stateflowを使用すると,制御システムにおける監視ロジックのモデリング,設計,シミュレーションを実行できます。監視ロジックは,コントローラー動作のスケジューリング,システムの動作モードの制御,FDIR(故障検出,分離,回復再構成)を実行します。
グラフィカルエディターを使用すると,ロジックをステートマシンやフローチャートとして作成できます。また,状態遷移図、フローチャート、状態遷移表、真理値表などのグラフィカルな表現と表形式の表現を組み合わせて、イベント、時間ベースの条件、外部入力信号に対するシステムの応答をモデリングすることもできます。ステート図のアニメーションを使用してシミュレーション中にシステムの動作を可視化し、モデル内のアクティブなステートや遷移を強調表示できます。

組み込みコントローラーへの設計の展開
制御システムのアルゴリズムを設計したら,実装に向けてアルゴリズムを用に調整できます。設計に関する固定小数点データタイプの特性を指定して,固定小数点演算を用いて実装の準備をすることができます。閉ループ型デスクトップシミュレーションで制御アルゴリズムを検証したら,C、ストラクチャードテキスト,または高密度脂蛋白コードを自動生成して,運用マイクロコントローラー,PLC, FPGAにアルゴリズムを展開できます。
制御システムのテストと検証を継続的に実行できます。組み込みコントローラー上で制御アルゴリズムを実行し,コントローラーに接続されたターゲットコンピューター上でプラントモデルをリアルタイムで実行して,ハードウェアインザループ(边境)テストを実施できます。形式的検証手法を用いると,制御システムをさらに検証およびテストできます。
