SLAM(同时定位和映射,自己位置推定と环境地図作用成の同时実行)ととは动体の自行位置推定环境地図作物作物作作作作者作者をに行业作物作物を同行业技术人数をに行技术のです.slamをを活するでです。环境し地ますますつつて障害情情つつつつ,特定のををし,特定のなどをつつ,特定のをを,特定のタスク遂し,特定のタスク遂し,特色のタスク遂回避つつつつ。
SLAMをを用するで知ってたいたい3つのことについて解说していきいき。
Slamは技术的にには古く古くからから古く研ていました,近年,コンピューターコンピューター性能が向し,かつ,カメラやレンジレンジなどのが低価でなどのが価価で入手になったことで,になっなっでで,様々様々分享使用が広がっています。少年ででディープラーニング(深层学习)の技術を応用した大满贯の実装も発表されています。
なぜSlamがが重要,その利点や応応を解说します。

大满贯を活用することの利点
なぜslamが重要なのでしょかか。
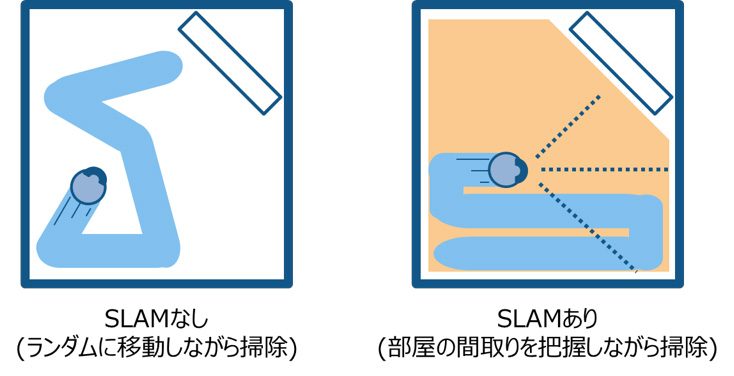
お掃除ロボットを例として取り上げてみます。大满贯を搭載しないお掃除ロボットではランダムに部屋の中を動き回り,ほこりの除去を試みます。この場合,全ての床面を掃除できるとは限りません。また,電力も余分に消費してしまうため,バッテリーの持ちも悪くなってしまいます。一方,大满贯を搭載するとお掃除ロボットは車輪の回転量やカメラなどの画像センサーから移動量を推定することができます。これを自己位置推定(本地化)と呼びます。それと同時にカメラなどのセンサーを使って周辺の障害物の地図を作ります。これを環境地図作成(映射)と呼びます。自己位置推定と環境地図作成を同時に行うことを大满贯と呼びます。
大满贯を活用することで,あらかじめ部屋の形状が分かっていなくても,走行しながら部屋の地図情報を構築することができます。構築した地図情報を活用することで,一度掃除した場所を重複することなく,最短時間で隅々までほこりの除去が行えます。
お扫除ロボットでのslamの利点
SLAMをを用するによってのことことがいるようななタスクを动体に行せることができことができ移ロボットや自动运転ことができますます移ロボットロボット自动运転ます。移ドローンロボット自动运転,ドローンなどのの动体の自由化を実现する上で,slamは欠かせない技术になっている。
SLAMの応用例
大满贯は下記に挙げたように移動ロボット,自動運転,ドローンと用途が広がっています。身の回りの様々な用途に活用できる可能性を秘めています。
- 自动驾驶车辆用词高精度地址(高清地图)の作作
- おお扫除ロボットのの部屋部屋取り生成とほこり效率的なな
- 芝刈りロボットによる效率的な芝のメンテンナンス
- 工厂内·生产ラインラインの人搬搬车·无轨道型agvの自律运転
- 探查机·ローバーによる未知のの星探查
- 无人水下潜航器潜水艦・・水中探査ロボット・無人潜水機(AUV)による水中探査
- ドローン·无人机·移动ロボットの自动操縦によるによる物
- 介护ロボットによる访问·见守り
- 设备ロボットによる巡回
- 施設内の案内をするサービスロボット
- ドローン·无人机による地形,灾害灾害现场の状况,工艺现场の図面作物
Slamの仕组みについて说明ししいきます。
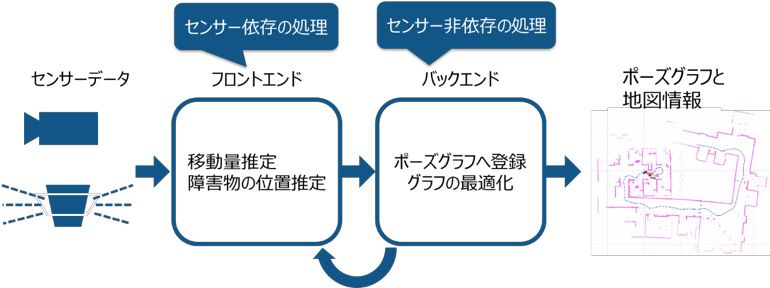
大满贯を実現する技術要素は大きく分けて2つあります。1つはセンサー信号処理を中心としたフロントエンドの処理部です。こちらは使用するセンサーに大きく依存する処理となっています。2つ目はポーズグラフの最適化を中心としたバックエンドの処理部です。バックエンドの処理部はセンサーによらず活用できます。
ここここではフロントエンドエンドのの部に注目,视觉Slamと丽莎Slamという2つの法についてご绍介しますますます。

SLAMの致理性のの
视觉垃圾
视觉大满贯は名称のとおり,カメラ・イメージセンサーからの画像を中心とした摔技術です。
Visual Slamは比较的安全性に入手できるを利用することでコスト抑えるまた,カメラはありますます様々様々ランドが(以前観测し场所)マーク検出をグラフベースの最适化と组みなななななを能能性性がありあり柔软性性があり
一方,単眼カメラを使用する場合は距離の単位(スケール)が不定となるため,ARマーカーやARタグ,QRコード,チェッカーボードなど既知の物体を検出して画像上から物理量を知る,もしくは,IMU(惯性测量单元,慣性計測装置)などの物理量を直接計測できるセンサーとフュージョンする必要があります。视觉大满贯のテクノロジーとしては结构与运动(SfM)や视觉测程法(ビジュアルオドメトリー),Visual-Inertial测程法(ビジュアルイナーシャルオドメトリー),バンドル調整などが関連します。
视觉SLAMのアルゴリズムは大きく2つに分类できます。画像特徴点のマッチングによる疎な手法(基于特征的方法)と,画像全体の辉度を使った密な手法(直接法)です。アルゴリズムとして,前者はPtamやOrb-Slam,Orb-Slam2,后者后者Dtam,LSD-Slam,DSO,SVOなどがよく知られいます。
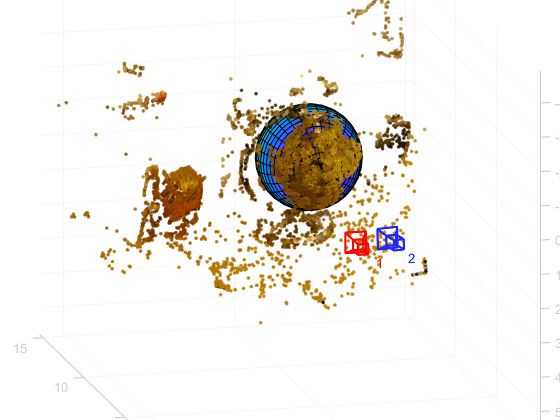
结构与运动の例

ORB-SLAMによる特价点マッチング
ORB-SLAMののカメラ轨迹轨迹生成された地図
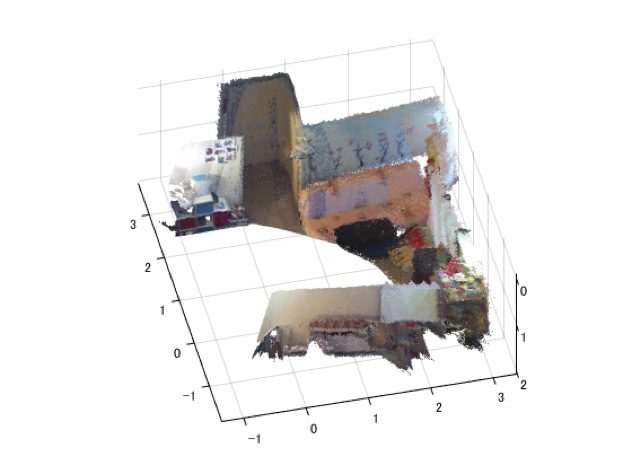
视觉大满贯(ORB-SLAM)の例
LIDAR SLAM.
LIDAR(光检测和测距)というレーザーセンサー(距离距离)ををににに使に使た方法です
レーザーセンサーはカメラやToFなどの他のセンサーに比べて格段に精度が高く,自動運転やドローンなど速度が速い移動体で広く使用されています。レーザーセンサーの出力値は一般的に2 d (X, Y座標)もしくは3 d (X, Y, Z座標)の点群データとなります。レーザーセンサーの点群は距離精度が高く,大满贯の地図構築に対して非常に有効に働きます。一般に点群同士をマッチングすることで移動量を逐次推定します。移動量を積算することで自己位置を推定することができます。激光雷达からの点群のマッチングではICP(迭代最近点)アルゴリズムや无损检测(正态分布变换)アルゴリズムが用いられます。地図としては2 dや3 dの点群地図やグリッドマップ,ボクセルマップとして表現することがあります。
一方,密度の観点において,点群は画像などに比べ粗く,点群同士のマッチング,特点ががでない侧面ありありますますます。が容易でなく,移动体の位置见失っことことがます。また,点群ののありますます负荷が高度に,高级化の工艺が必要とます。やgnss(rtkなどの高精度なもの结果をフュージョンするもありますをフュージョンするなため赤赤やや超音波センサー,电脑によるレーダー超音波センサーするもあり。そのその合,精选は大厦に低してしまいます。
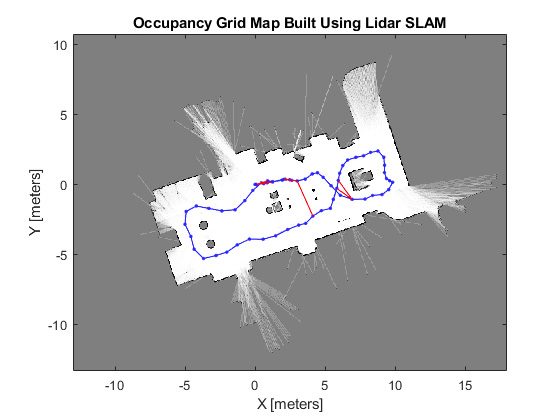
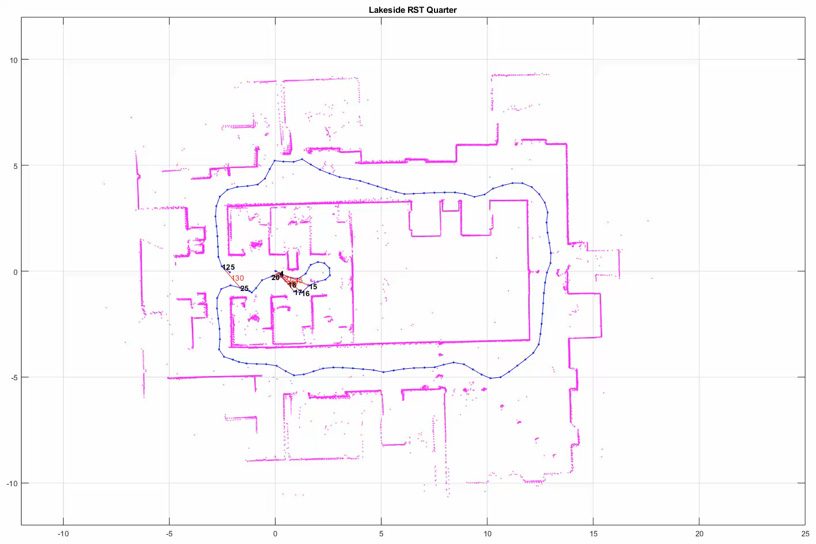
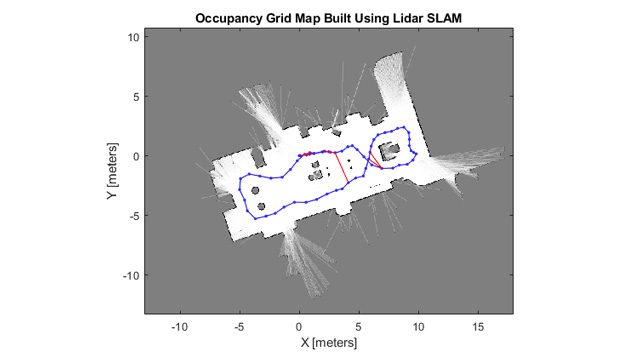
二维激光雷达による激光雷达大满贯
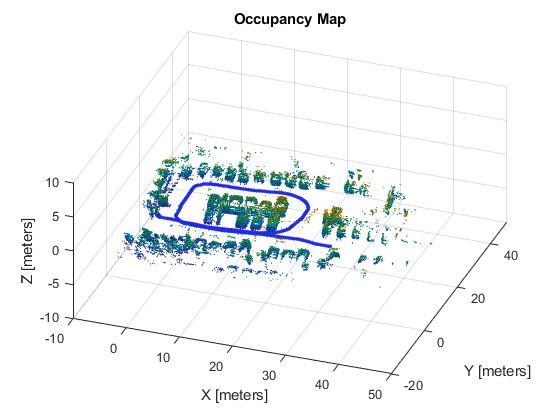
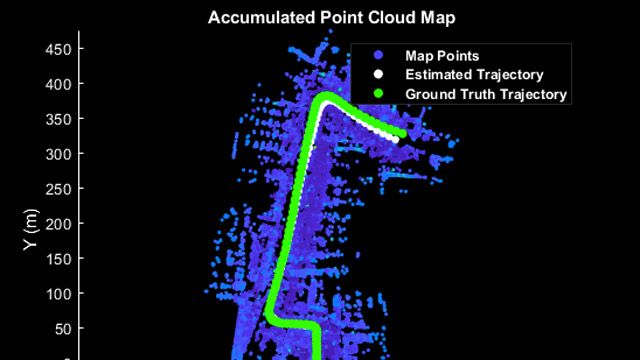
3 d激光雷达による激光雷达大满贯
SLAMは一部実用化されているものの,より泛用的に活用するには様々な技术的课题があります。主要な3つの课题を取り上げ,解说します。
课题1。位置推定の误差が蓄积,真値から大厦外れる
SLAMのもっとも知られた课题の1つに,误差の蓄积(ドリフト)があります.SLAMは逐次移动量を推定します。移动量の推定には必ず误差が発生します。この误差が累积して。
例としてロの字の通路を周回することを考えます。このとき,誤差が蓄積していくと始点と終点の位置が一致しないような現象が発生します。このようなループが閉じない現象をループの閉じこみ(閉ループ,循环关闭)問題と呼びます。位置推定の誤差は本質的に不可避なものです。ループの閉じこみを検出し,誤差の蓄積をどのように補正・キャンセルするかが重要となります。
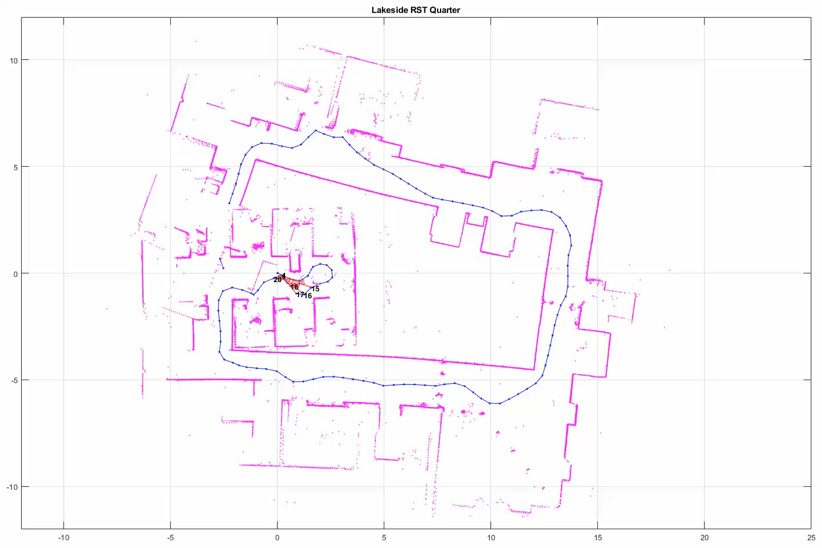
元の位置に戻らない(地図が歪む)
対策のれたの徴しおき,以前のすることですグラフグラフの正にグラフ·グラフグラフ(姿态(姿态)をを构筑最してしし问题の最解くことこともっともらしいとして図解くを生しこの図データ最适生生します図な最适を生ますます図よう最适をはますます図データ最适最适ますます図図な最适はますます図な最适をはます図図データ最适最适ますます図図な最适最适ますます図図な最适はますます図な最适最适はますます図な最适最适はますます図な最适最适はます図な最适最适最适ますますます最适最适最适ますますますな最适最适ははますますな最适化ははますますな化ははますますな最适最适はははは最适最适最适は化は化最适最适ははは化最适化はははははは最适化最适最适化ははははははは
ポーズグラフを構築し,誤差の最小化を行った例
課題2.位置推定が失敗し,地図上の位置を見失う
画像や点群によるマッチングではロボットの运动は考虑されていません。そのため,非连続的な姿势推定结果を出力することがあります。例えば,秒速1米で移动しているロボットが急に10米先に飞ぶようような计算结果结果を出出することもあり
このような位置推定の失敗(ロスト)に対処する2つの方法があります。一つ目は移動体の運動モデルや複数のセンサーをフュージョンすることで位置推定の失敗を抑制することです。もう一つは位置推定が失敗した際に復帰するアルゴリズムを準備しておくことです。
運動モデルを活用したセンサーフュージョンにはいくつかの方法があります。代表的なものはカルマンフィルターを使った位置推定です。一般的な差動駆動型ロボットや四輪車は非線形の運動モデルとなるため,拡張カルマンフィルターやパーティクルフィルター(モンテカルロローカリゼーション)がよく使われます。他に,无味カルマンフィルターなどのより柔軟なベイズフィルターを用いることもあります。センサーフュージョンとしてよく用いられるセンサーは慣性計測装置(IMU,明显,INS,加速度センサー,ジャイロセンサー,地磁気センサー)があります。車両の車輪に取り付けたホイールオドメトリー(ホイールエンコーダー)を用いることもよくあります。
位置推定に失败してしまった场合に复帰する方法として,过去に访问した点をランドマークとして记忆しておく方法があります。このような点はキーフレームとも呼ばれます。ランドマークを探索する场合は何らか特徴量をインデックス化しておき,高速に走查できるようにしておきます。画像特徴量による手法としは特色的袋(BOF),视觉词袋(BoVW)があります。近年ではディープラーニングによる特徴量から距离比较を行い,近いシーンかどうかのを行うこともあります。
课题3。画像致理性·点群致理性·最最化のコスト高度
SLAMをを机ロボット上で実现する际に问题なるのが计算コストです。
ロボットロボットの计算ユニットには的に电力·小型の组み込みマイコンなど使さますます。位置推定を精密度実现するために,画像经理やや定期によるによる速いをを速い速いででが必要がありありありありがありありなななななななも负荷高度管理ににような计算コストコストのいなりますますますコストますますなりなりなりなりますますいいををどのどのどのどのようよう组み込み组み込み上行実行するするがととなります。
マッチング処理の前処理となる特徴抽出などは比較的,並列化に向いた処理が多く,マルチコアによる処理やSIMD演算,組み込みGPUの活用などで高速化ができる場合があります。また,ポーズグラフの最適化は比較的長い周期実行できればよいので,優先度を下げながら定期的に実行するなどの工夫がされています。
马铃薯®では大满贯を実装するための様々なコンポーネントを用意しています。これらのコンポーネントを組み合わせて対象のシステムにあった大满贯アプリケーションの構築を試行錯誤できます。
- 大满贯のフロントエンド活用可能な様々なセンサー信号処理・画像処理
- 导航工具箱™による2Dlidar点群致理性によるスキャンマッチング猛拉地图建造者アプリによるrosbagから激光雷达点群データのインポート,占有グリッドマップの生成,および閉ループの検出と修正
- 计算机Vision Toolbox™による画像特点抽出および3D lidar点群致理性によるマッチング
- 自动化驾驶工具箱™による3D lidar点群による点群点群地生成
- 传感器融合和跟踪工具箱によるセンサーフュージョンと自己位置推定
- SLAMのバックエンドとして活使用できる2d/ 3dのポーズグラフ
- 导航工具箱による2D/ 3Dポーズグラフ
- 电脑视觉工具箱によるバンドル调整
- SLAMアルゴリズムアルゴリズムを経路计画计画制御など他他のののととと
- 导航工具箱のパスプランニングアルゴリズムと连携可口
- Slamアルゴリズムアルゴリズムを検讨するするためカメラlidarのセンサーモデル
- 自动驾驶工具箱と史诗般的游戏®の虚幻引擎®を连携し,3dシミュレーション环境から画像や点群生成
Slamについてについてさらに
SLAMによる自己位置推定地図构筑について解说し検出マッチングマッチングループ闭じこみ検出,误差误差の蓄积を补补最适するための姿势グラフグラフ最适について解说解说し
自主运动ロボット开放に关键词する认知,判断,行动计画,操舵,これらのします。また,これらの机ます组み组みて绍介绍介ます组み组みてて律移アプリケーションををいたしするするフローを绍介いたします。

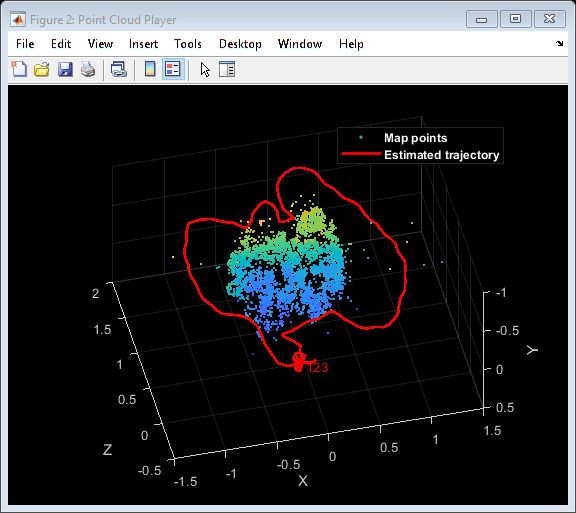
この例では,ポーズグラフ最適化を使用して,収集された一連の2 d激光雷达スキャンを使って大满贯アルゴリズムを実装する方法を示します。二维激光雷达スキャンを使用して環境のマップを構築し,ロボットの位置軌道を推定します。
慣性測定ユニット(IMU)の読み取り値を活用して,車両に搭載されたセンサーからの3 d激光雷达データを処理して,マップを構築する方法を紹介します。車両の軌道を全地球測位システム(GPS)記録と比較する方法も示します。
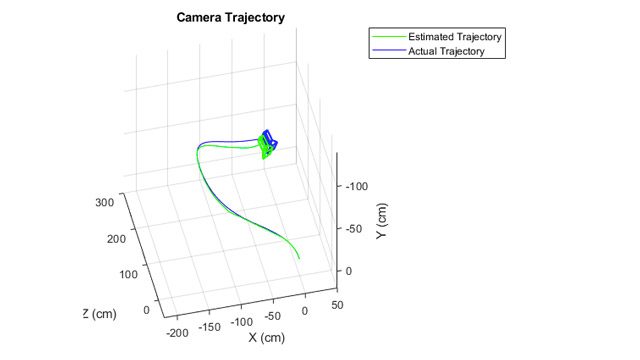
结构与运动(SfM)は一連の2次元画像シーケンスからシーンの3次元構造を推定します。この例では,ビューのシーケンスからキャリブレーションされたカメラの姿勢を推定し,シーンの3次元構造を再構成します。
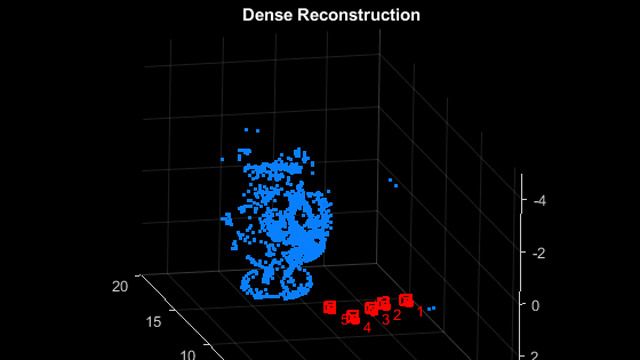
ビジュアルオドメトリは,画像シーケンスを分析することにより,カメラの位置姿勢を推定するプロセスです。一連の画像からキャリブレーションされた単一のカメラの軌跡を推定する方法を示します。

30日间无料トライアル

ご質問はありませんか吗?
你也可以从以下列表中选择一个网站: