El Ajuste Y LaImportaCióndealgoritmosde控制PID Implican Diversas Tareas,Entre LAS Que SE Chertuyen:
- Seleccióndeunalgoritmo de控制PID ApropiaDo(P,PI O PID)。
- Ajuste de Ganancia del Controlador。
- Simulacióndel控制PID Con Actiono A UN Modelo de Planta。
- ImpeedAcióndelcontrowadoren联合国Procesador deEjecución。
Matlab Y Los Productos CompleartionArios Aportan Eficiencia A estas areas dediseño,雅阙比尔登:
- Configurar El Bloque PID Controller De 万博1manbetxSimulink Para Un Algoritmo De Control PID(P,PI O PID),La Forma del Controlador(Paralela OEstándar),LaProtección防空(Actiachada O Desactivada)Y LaSaturacióndeLaSalida del Controlador(Scriachada o Desactivada)。
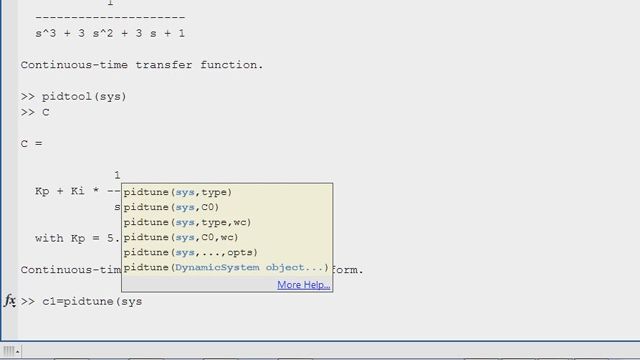
- ajustarautomáticamentelas ganancias del controlador y真实un ajuste detalado del desforma Interactiva。
- ajustar varios controladores por lotes。
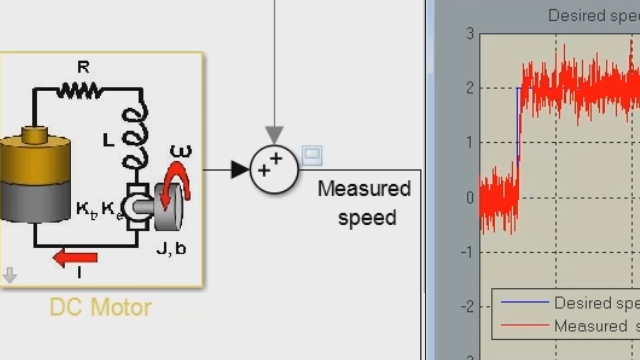
- ejecutar simulaciones de sistemas de lazo cerrado mediante laConexióndelBloque Pid控制器Con El Modelo de Planta。
- WenerarCódigoCde FormaAutomáticapara suejecuciónnenenicocontrolador。
- Washerarulado Iec 61131 Para SuEJCuciónNCLCo Pac。
- AuventarAutomáticamenteLasGananciasdel Control PID Para ImpementArlo en Un Cocesador ConAritméticade Coma Fija。