Matlab Y 万博1manbetxSimulink Para Sistemas De Control
Diseñe,Pruebe E实施Sistemas de Control
Los Ingenieros de Sistemas de Control Utilizan Matlab®y 万博1manbetxsimulink.®恩托达拉斯etapas德DESARROLLO,desde拉modelización德拉植物中闪现ELDISEÑOŸajuste德洛斯algoritmos去控制和La逻去监督,finalizando CON LAimplementación格拉西亚斯一拉generación。自动化德código和Laverificación,validaciónÿcomprobación德尔SISTEMA。Matlab Y 万博1manbetxSimulink OfRecen:
- UN Entorno de Diagrowas de Bloques Multidominio Para Modumizar LaDinámicade la Planta,Diseñaralgoritmos de Contine Y Ejecutar Simulaciones de Lazo Cerrado。
- Modelizacióndeplantasmediante Herramientas deModelizaciónFísicaoIdendificacióndelsistema。
- FuncionesprediseñadasŸHERRAMIENTAS interactivas对analizar EL sobreimpulso,时代报德SUBIDA,EL margen德FASE,EL margen德gananciaŸotrasCARACTERÍSTICAS德rendimientoŸestabilidad连接洛杉矶dominios德拉frecuenciaŸ时代报。
- Lugar deRaísce,Diagramas de Bode,LQR,LQG,Control Robusto,Control Predictivo de Modelos YOtrasTécnicasdediseñoyAnálisis。
- AjusteAutomáticode Sistemas de Control PID,De Ganancia Programada y Siso / Mimo Arbitrios。
- ModelizaCión,DiseñoYSIMULACIONENDELALOGICADESupervisiónLLEVARACabo LaPlanificación,El Cambio de Modo Y LaDetección,Aislamiento YRecuperacióndeer(FDIR)。
“Mediante Las Herramientas de Mathworks Para ElDiseñoAbadoen Modelos,No Solo Simulamos Nuestros alloritmos de Control,SinoTambiénel Hardwayfísico。Gracias A LaWeneraciónAutomáticadeCódigopara el El软件de Control y El Banco de Pruebas,Redujimos El Tiempo de Desarrollo E Importamos LosCambiosRápidomente。Visualizamos Los ResultAdos de las pruebas y lasimulación,lo que nos diobianza en Eldiseñoqueimentamos finalmente。“
大卫格里,八月

USO de Matlab Y 万博1manbetxSimulink Para Sistemas de Control


modelizaciónysimulacióndelainámicade la planta
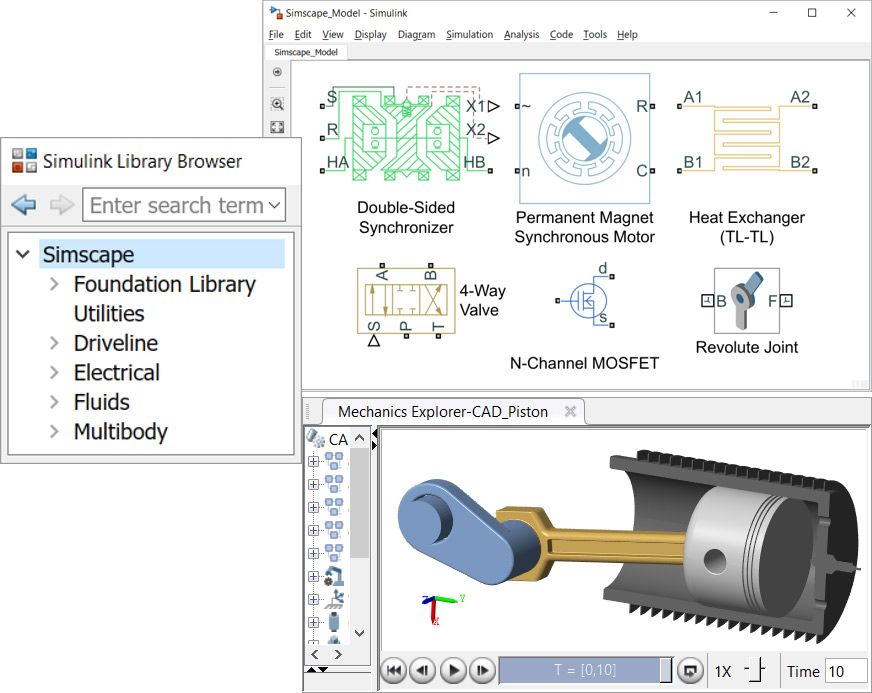
使用Matlab Y Si万博1manbetxmulink Para Cra Modelos Precisos de Plantas。描述ladinámicacompleja de la planta mediante多样性enfoques demodelizaCiónyEmpleaeElEnfoquemásapropiado para cada componente de su planta a fin de crearel el modelo de planta一个nivel del sistema。
Calcule LaDinámicade la planta a partad de los datos de intrada-salida mediante laIdendificacióndelsistemaCuando No Conozca La Estructura Detallada del Modelo。Si Lo Prefiere,TambiénPuedeCrear ModelOS de Plantas Complejos Multidominio Sin Tener Que Derivar Las Ecuaciones SubyCenes de Primeros Principios Mediante LasHerramientas deModelizaciónFísica.Utilice bloques que代表组件mecánicos, eléctricos, magnéticos, hidráulicos, neumáticos y térmicos para establecer la topografía de los components y las conexiones físicas de su sistema。
Explorar Productos.

diseñoyajuste de comperadores deRetroalimentación
Analice Y Desarrolle Requadores de Lazo Cerrado YEvalúeLOSParámetrosClavede Rendimiento,Tales Como El Sobreimpuls,El Tiempo de Probida YLosmárgenesdeAstabilidad。Busque Los Puntos de Equilibio Y LineLice Modelos de Si万博1manbetxmulink No Lineales。tambiénpuede modulizar y analizar los efectos de la incertidumbre sobre el rendimiento y la Estabilidad de Sus Modelos。
Recurra一个diagramas德博德,卢格德RAICESýotrasTÉCNICAS德DISEÑO德SISTEMAS德控制直系ýajusteautomáticamentecontroladores PID烯未莫德洛德模拟ö烯硬件去prueba。Las HerramientasPermiseñadaspermeran ajustarautomáticamentecontrousores多变量descentralizados y sacar partido de Estrategias de Control Avanzadas,Tales Como El Control预测De Modelos Y El Control Robusto。UritiseMétodosdeMotiolizaciónGaraGuckularLas Ganancias del Controlador A Fin De Squaracer Restricciones de Tiempo de Probida Y SobReimpulso。
MásfiginaCión.
Diseñoyimulacióndalalógicadesupervisión
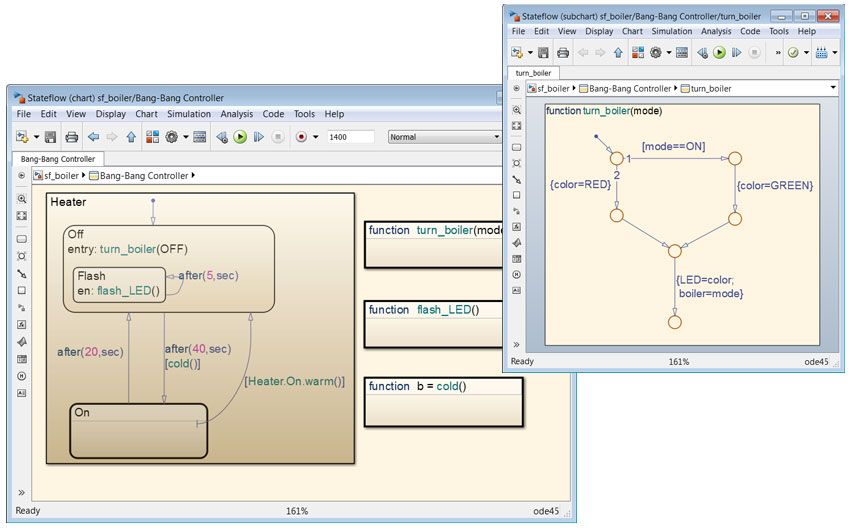
用途州流程第modelizar,diseñarÿsimular LA逻德监督去苏SISTEMA去控制,阙programa EL funcionamiento德尔controlador,controla EL摩多operativo德尔SISTEMAýlleva一个卡布LAdetección,EL aislamiento和Larecuperación德fallos(FDIR)。
利用el编辑Gráficopara crear sulógicaa modo demáquinade Estado O de diagchaa de Flujo。Tambiénesposiblecombinar exciencionesgráficasy图案DiaNticióndeestado,Diagrowas de Flujo,Tablas deTransicióndeEstadoy Tablas de Verdad,Con El Fin de Modelizar La Forma en Que El SistemaReacionaráThe洛斯·埃弗斯(Las Condiciones Basadas)El Tiempo Y LasSeñalesdeCentadaexternas。Visualice El Comportamiento del Sistema Durante LaSimulaciónMedianteMiaNACIONESde Diagnesas de Estado A Fin de Resaltar Los Estados Y Las Transiciones Activas en En En El Modelo。
MásfiginaCión.
Explorar Productos.
Impilesacióndediseñosen Controladores Embebidos
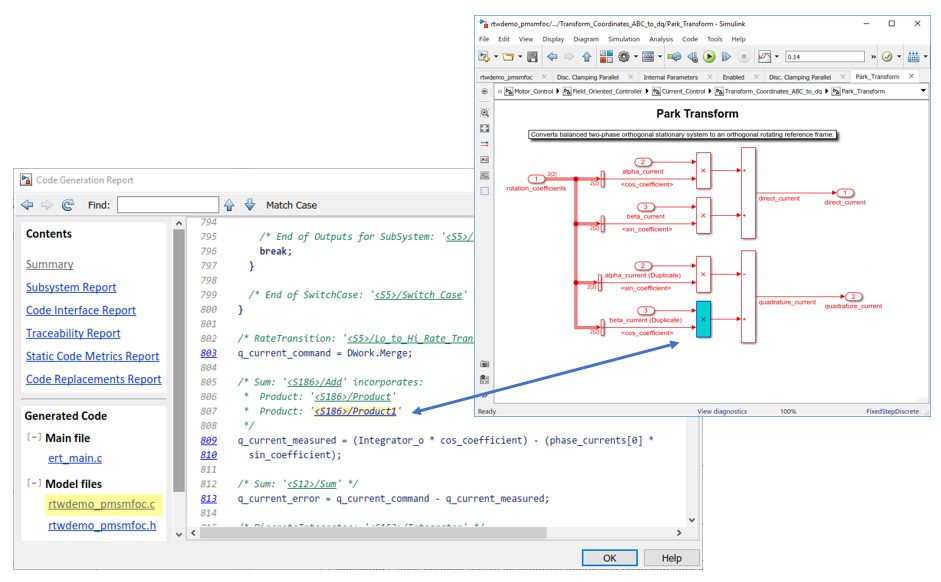
Una Vez Que Se SE SERIITMOS DEL SISTEMA DE控制,ES POSIBLE AJUSTARLOS Para LaMideveración。噗噗Especificar Las提议Del Tipo de Datos en Punto Fijo de SuDiseño芬兰·弗里雅·弗里雅·弗里雅·弗里雅·菲纳的芬德制作条件。Tras Verificar Los Algoritmos De Control en Simulaciones de Escritorio de Lazo Cerrado,PodráimentsARLOSen MicroControladores,PLCS Y FPGAS deProducciónGraciasALaFerensaciónAmailáticadeCódigoc那Texto estructurado.O.códigohdl..
存在La Posibilidad de Probar Y Verificar El Sistema de Control de Forma Continua。Lleve A Cabo Pruebas硬件换流(HIL)Mediante LaEjecucióndel Algoritmo de Control en Un Controlador Embebido Y LaEjecucióndelModelo de Planta enTiempo真实en Un Equipo Concectado Al Controlador。Tambiénesposibleverificary probar el sistema de ControlMedianteMétodosdeverificación正式.
