robótica隐含的描述程序为informáticos,它允许一个机器人进行发射,公式平面,决定发射区域。请允许我们对机器人的程序进行修改autónoma dentro de edifiicio要求detección y percepción, localización y mapeo, planificación y seguimiento de trayectorias,系统控制其他区域。
LaRobótica普通威尔文:
- 有能力的一个机器人,我们可以使用visión人工和深度学习的中间算法detección de objetos, clasificación y seguimiento, y estimación de movimientos
- proporcionarautonomíaa联合国机器人mediante alloritmos delocalización y mapeo simultáneos (SLAM), evasión de colisiones y planificación de movimientos
- Controlar El Comportamiento de Un Robot Mediante ElDiseñode Sistemas De Control,Tales Como Control Prodictico de Modelos,控制POR Par Motor Calculado Y Seguimiento de Traycureras
- 该产品适用于不同的嵌入式平台,包括CPU, GPU, FPGA微控制器
我们的工程师可以在robótica上画一个示意图,我们可以在máquina上画一个示意图,我们可以在机器人前面画一个示意图。También utilization lenguajes de programación como C/ c++, Python®,java.®y MATLAB®机器人操作系统(ROS)在硬件abstracción中描述算法,在硬件配置中描述控制,在硬件transmisión中描述处理过程。
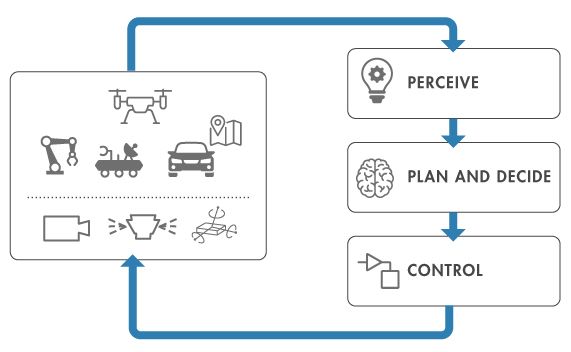
Flujo de trabajo习惯性para proyectos de robótica。
Con Frecuencia,UN错误en Un Paso Puede Afectar A Todo El Flujo de Trabajo del Proyecto deRobótica。El ModelAdo Y LaSimulaciónN软件AYUDAN A Prevenir Errores DeImpeedAción,雅阙Identifican问题杜兰特EL Protipado,EN Lugare de Encontrarlos en El Proceso deProduccióndoRobotsO,Lo QueSeríaPeorAún,Al Utilizarlos en Un Entorno del Mundo Real。Simular El SistemaTambiénAyudaALINENIEROSA Perfeccionar SuDiseñoAjustandoLOSparámetrosde Control,Sin Importar El Tipo Platraforma Ni Tener Acceso Al Hardware Del Robot。
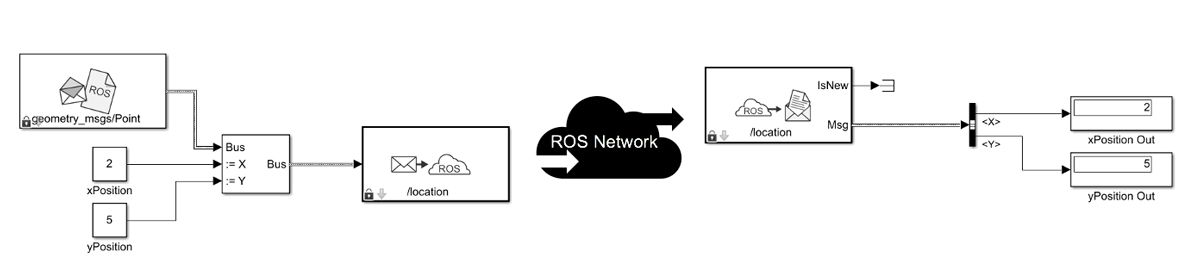
Matlab Ofrece Varios algoritmos Y Funciones Integrados ParaRobótica。Por Ejeallo,Con UNAS POCASLíneasde Algoritmos de Dee Deave学习Listos Para Usar de Matlab,Los Robots Pueden明确的反对意见.万博1manbetxsimulink.®OFERECE Bloques Predefinidos Para Modelado YSimulaciónCondiseñoAbadoen Modelos ParaRobótica。Por Ejeallo,Los Bloques Ros de S万博1manbetximulink Permener一个LOS Programadores de Robots Suscribirse A Datos De Sensores Y Publicar Comandos Para Robots ATravésdeNoaRed Ros Sin Necesidad de EscribirCódigo。
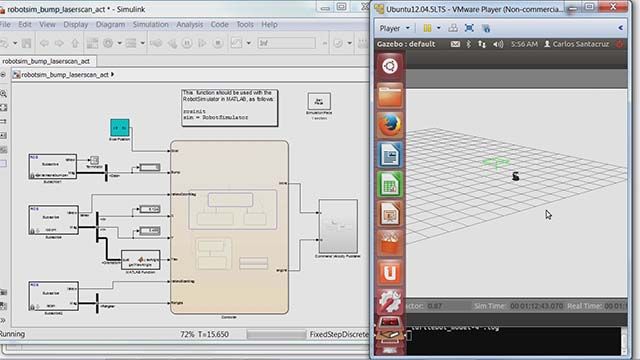
用MATLAB和Simul万博1manbetxink模拟robótica,就可以了Simulación机器人可升级Para prototipar,Probar Modelos概念y Depurar de FormaEconómica。Luego,Puede uterizar Los ModelOS de Alta Fidelidad Para LaValidaciónMientrasMantiene El Resto de Los Algoritmos en El Mismo Entorno deSimulación。Una Vez Obtenido El结果Deseado en LaSimulacióndelobot,Puede Gendigo ejecutabledediente Para El Sistema Embebido A PartuaJes de Spectinach en Lenguajes deProgramac万博1manbetxióndeUsoFrecuente。Mediante La Conectadad de Matlab Y Si万博1manbetxmulink Con Una Red Ros,Puede Generar Nodos ROS C ++ Directamente Desde Matlab Y Simulink Para Pararion Y Verificar Aplicaciones en Robots Dotados de Ros Y Simuladores de Robots Como Gazebo。
ParaObenerMásfignacaciónSobrerobótica,顾问机器人系统工具箱™,导航工具箱™,ROS工具箱,MATLABy万博1manbetx.
{kind=link}