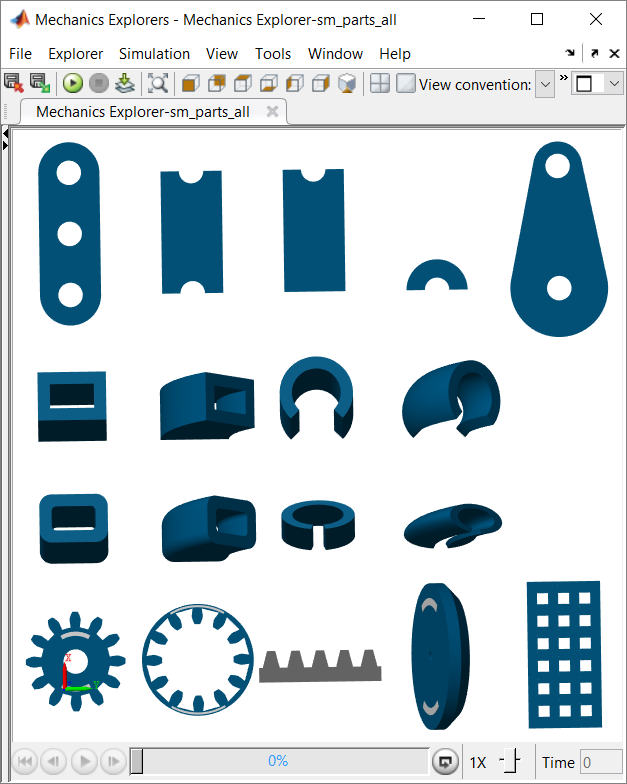
这组示例显示了如何为Simscape Multibody创建参数化零件,以及用于定义一般挤出的Matlab脚本。这些部件已用于广泛的示例中以显示这些块如何使您能够快速模拟机制。在图书馆内是一组齿轮组件。参数化齿轮组件将所需的块分组在一起并参数化它们,以便帧始终正确并正确定向。
请阅读README.MD文件以开始。
上面使用“从GitHub下载”按钮来获取与MATLAB的最新版本兼容的文件。
使用下面的链接获取与MATLAB的早期版本兼容的文件。
对于R2020B:https://github.com/mathworks/simscape- multibody-parts-library/archive/20.2.4.0.zip.
对于R2020A:https://github.com/mathworks/simscape- multibody-parts-library/archive/20.1.4.0.zip.
对于R2019B:https://github.com/mathworks/simscape- multibody-parts-library/archive/19.2.4.0.zip.
R2019a:https://github.com/mathworks/simscape- multibody-parts-library/archive/19.1.3.0.zip.
对于R2018B:https://github.com/mathworks/Simscape-Multibody-Parts-Library/archive/18.2.3.0.zip
对于R2018A:https://github.com/mathworks/simscape- multibody-parts-library/archive/18.1.2.4.zip.
对于R2017B:https://github.com/mathworks/simscape-multibody-parts-library/archive/17.2.2.3.zip.
对于R2017A:https://github.com/mathworks/simscape-multibody-parts-library/archive/17.1.2.2.xip.
对于R2016A:https://github.com/mathworks/Simscape-Multibody-Parts-Library/archive/16.1.1.8.zip
对于R2013A:https://github.com/mathworks/simscape- multibody-parts-library/archive/13.1.2.zip.
要了解如何在Simsceive Multibody中定义机构,请观看此视频(5分钟):
https://www.mathwands.com/videos/defining-rigid-bodies-68845.html.
要了解更多关于Simscape multibody模拟的知识,请观看本次网络研讨会:
//www.tianjin-qmedu.com/videos/multibody-simulation-with-simmechanics-81877.html.
要查找其他Simscape示例,请使用关键字“物理建模”的帖子搜索帖子
//www.tianjin-qmedu.com/matlabcentral/fileexchange/?Term=%22physical+modeling%22
要了解有关MathWorks Simscape产品的更多信息,请转至:s manbetx 845
https://www.mathwands.com/万博 尤文图斯solutions/physical-modeling.html.
引用
史蒂夫米勒(2021)。Simscape Multibody Parts库(https://github.com/mathworks/simscape-multibody-parts-library/releases/tag/21.1.4.0),github。检索到。