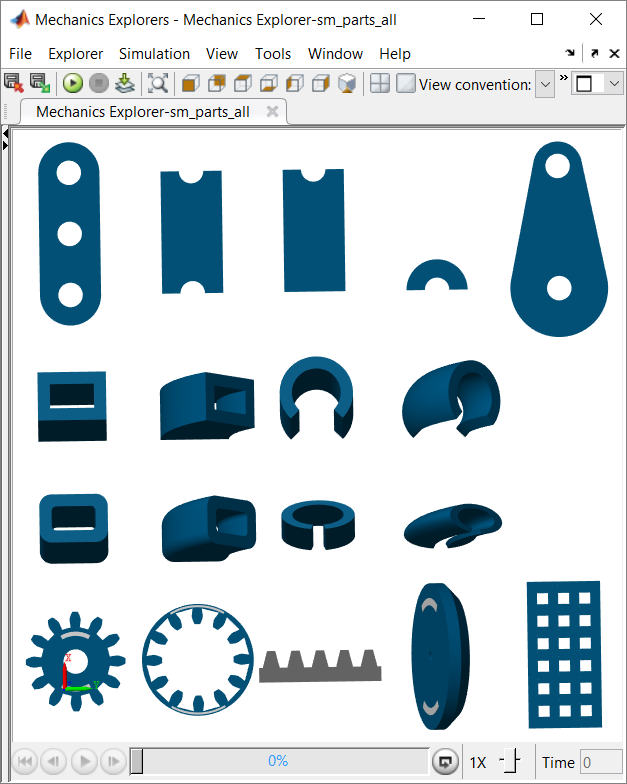
这组示例向您展示了如何为Simscape Multibody创建参数化零件,以及用于定义常规拉伸的示例MATLAB脚本。这些零件已在广泛的示例中使用,以显示这些块如何使您能够快速建模机制。库中有一组齿轮组件。参数化齿轮组件将所需的块组合在一起,并对它们进行参数化,以便机架始终正确定位和定向。
请阅读README.md文件开始。
上面使用“从GitHub下载”按钮来获取与MATLAB的最新版本兼容的文件。
使用下面的链接可以获得与MATLAB早期版本兼容的文件。
对于R2020b:https://github.com/mathworks/simscape- multibody-parts-library/archive/20.2.4.0.zip.
对于R2020a:https://github.com/mathworks/simscape- multibody-parts-library/archive/20.1.4.0.zip.
对于R2019b:https://github.com/mathworks/simscape- multibody-parts-library/archive/19.2.4.0.zip.
对于R2019A:https://github.com/mathworks/simscape- multibody-parts-library/archive/19.1.3.0.zip.
对于R2018B:https://github.com/mathworks/simscape- multibody-parts-library/archive/18.2.3.0.zip.
对于R2018a:https://github.com/mathworks/Simscape-Multibody-Parts-Library/archive/18.1.2.4.zip
对于R2017B:https://github.com/mathworks/simscape-multibody-parts-library/archive/17.2.2.3.zip.
对于R2017A:https://github.com/mathworks/simscape-multibody-parts-library/archive/17.1.2.2.xip.
对于R2016A:https://github.com/mathworks/simscape- multibody-parts-library/archive/16.1.1.zip.
对于R2013a:https://github.com/mathworks/Simscape-Multibody-Parts-Library/archive/13.1.1.2.zip
要了解如何在Simscape Multibody中定义实体,请观看此视频(5分钟):
https://www.mathwands.com/videos/defining-rigid-bodies-68845.html.
要了解更多有关Simscape Multibody的多体模拟的更多信息,请查看此网络研讨会:
//www.tianjin-qmedu.com/videos/multibody-simulation-with-simmechanics-81877.html.
要查找其他Simscape示例,请搜索带有关键字“physical modeling”的帖子
//www.tianjin-qmedu.com/matlabcentral/fileexchange/?Term=%22physical+modeling%22
要了解有关MathWorks Simscape产品的更多信息,请转至:s manbetx 845
https://www.mathwands.com/万博 尤文图斯solutions/physical-modeling.html.
引用为
史蒂夫·米勒(2021年)。Simscape Multibody Parts库(https://github.com/mathworks/Simscape-Multibody-Parts-Library/releases/tag/21.1.4.0),GitHub。恢复。