控制系统设计与控制系统设计App
Arkadiy Turevskiy, MathWorks
使用Control System Toolbox™使用交互和自动调优方法设计单输入单输出(SISO)控制器。使用波德编辑器和根轨迹编辑器添加和删除控制器极点和零,并改变环路增益。在调优控制器参数时查看闭环步长响应中的更改。观察系统特性,如上升时间、超调、增益和相位裕度。创建和存储多个控制器设计,以比较和选择最佳选项。
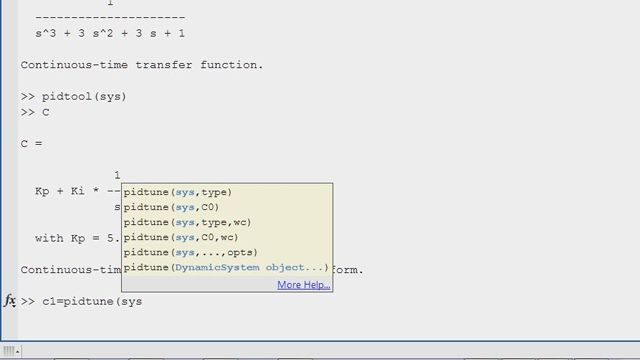
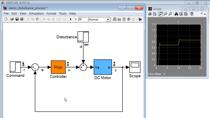
控制系统设计应用,您可以使用图形和自动调谐的方法调谐的单输入单输出补偿器。如果你知道你的工厂传递函数,SYS,在这个简单的情况下,1 S1上加1,您可以通过键入controlSystemDesigner(SYS)发射控制系统设计的应用程序。
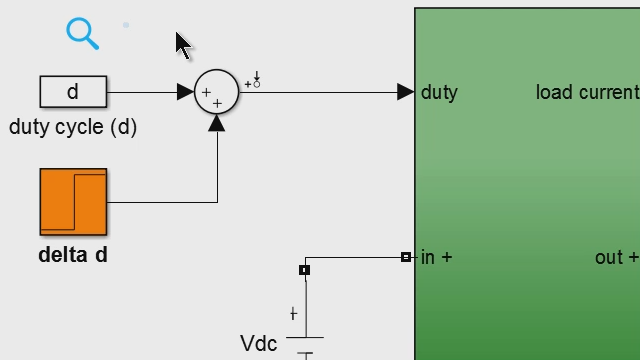
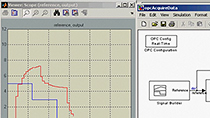
该应用程序打开了几个地块。在这里,你看到波特编辑器,这里是根轨迹编辑器。您可以使用该地块的图形调整。在该图中,你得到的闭环系统的阶跃响应。如果你点击编辑架构,你可以配置你的控制器架构,并导入新工厂传递函数的和现有的补偿。
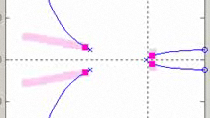
在调优方法中,您可以选择想要使用的图形调优方法,波德、闭环波德、根轨迹和Nichols。在这种情况下,我们将坚持使用我们已经打开的波德和根轨迹编辑器。既然已经选择了设计图,就可以开始调优补偿器了。要改变你的补偿器的增益,调整波德图的大小,或移动根轨迹编辑器的闭环极点。
您可以轻松地零极点添加到您的补偿。在这种情况下,系统需要积分达到零稳态误差。一旦积分被添加,你可以调整补偿增益达到很好的阻尼响应。
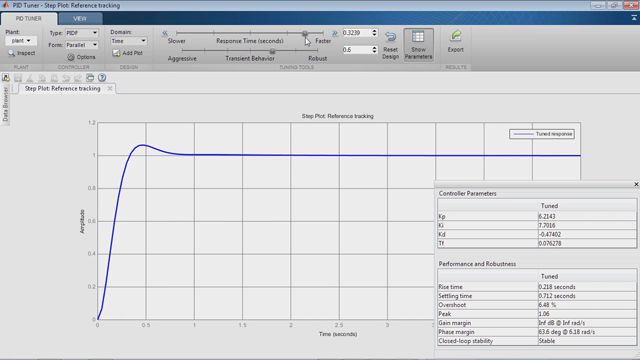
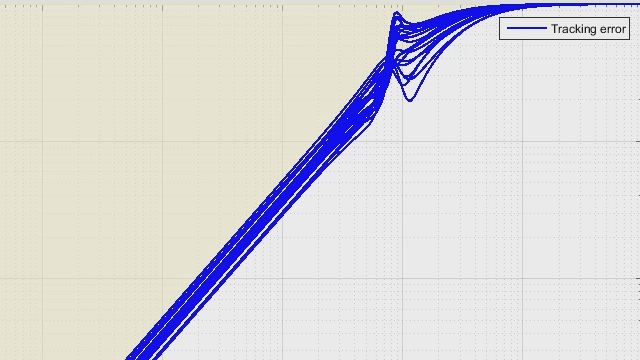
在阶跃响应图中,你可以检查系统的特性。例如,你可以看到上升时间大约是2。5秒。如果你想让响应更快并保持良好的阻尼,你可以在系统中添加一个超前补偿器。您现在可以交互地改变极点和零点的位置,以及补偿器的大小。
如果您右键单击其中一个设计图并选择编辑补偿器,您将看到补偿器的结构。现在它有一个增益,一个积分器,和一个领先。您可以在这里直接编辑参数。例如,你可以在- 1处放一个0,在- 10处放一个极点。当这些变化发生时,请注意该工具是如何自动计算来自跃变补偿器的最大短语导程的数量以及相应的频率的。
不需要输入零和极点位置,您可以指定您想要的短语引导的数量和频率。该工具将自动重新计算值的零和极点相应。你可以回到这些图,看到结果的步长响应,波德图,根轨迹。您可以通过再次调整大小,以交互方式继续调优。或者,你可以放大根轨迹的这个区域继续移动系统的极点。
一旦你有了你喜欢的设计,你可以存储它按下商店设计按钮。你可以存储许多你想要的设计。您可以继续调优补偿器,但在任何时候都可以选择以前保存的设计并检索它。你也可以比较几种设计。
除了图形调谐,控制系统设计的应用程序提供自动调谐技术,例如自动化的PID调谐,LQG合成,环路shaping--这需要一个鲁棒控制Toolbox--和基于优化Tuning--它需要Simulink设计优化。万博1manbetx
在任何时候,您都可以将当前或已保存的设计导出到MATLAB工作区,以便进行进一步的分析。
视频到此结束。
产品集中
记录:2016年3月3日
相关视频和网络研讨会










您也可以从以下列表中选择一个网站: