为机器人制定多变量控制系统
Shashank Prasanna,Mathworks
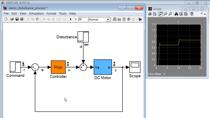
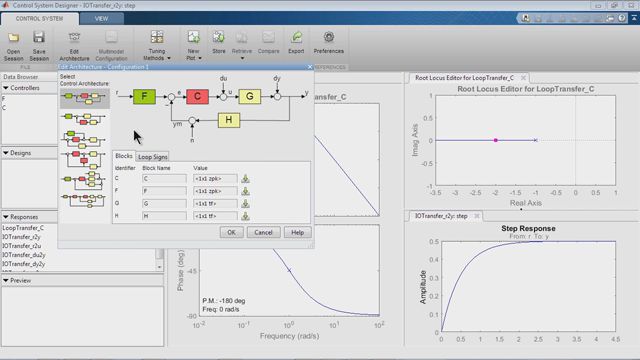
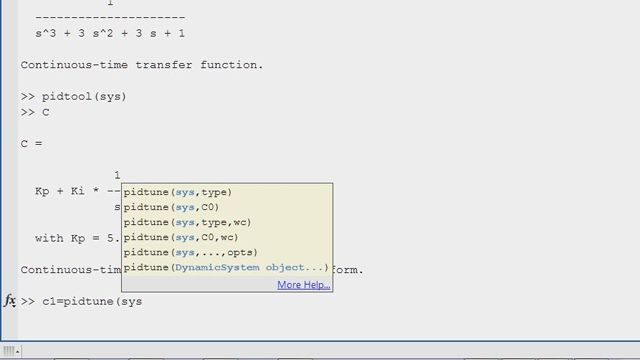
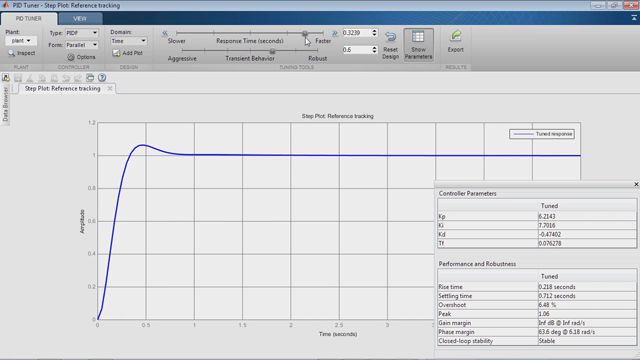
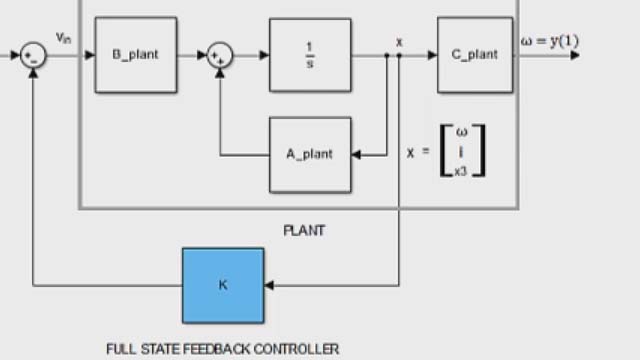
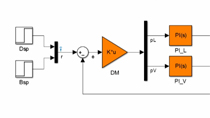
在本网络研讨会中,您将学习如何使用模拟来设计和为四个联合机器人臂设计和实现多变量控制器。我们使用两种不同的技术超出了各个PID控制器的传统调整。第一种方法显示了同时自动调谐四个耦合PID控制器。第二种方法演示了使用机器人臂的内部模型的模型预测控制器(MPC)的设计来预测未来的工厂行为并相应地调整控制动作。
我们开发两个控制器后,我们测试并验证其性能。使用桌面仿真,控制器首先验证非线性机器人臂模型。然后,使用自动代码生成来实现C代码中的控制器。最后,我们通过实时控制机器人臂完成设计验证。
关于演示者:Shashank Prasanna是MathWorks的一个应用程序支持万博1manbetx工程师。他与Matlab和Simulink拥有丰富的经验。万博1manbetx莎兰克拥有一个M.S.在亚利桑那州立大学的控制系统中的电气工程中。
相关视频和网络研讨会







您还可以从以下列表中选择一个网站: