与控制系统工具箱PID控制设计
长Arkadiy Turevskiy,MathWorks公司
设计PID控制器使用控制系统工具箱™。
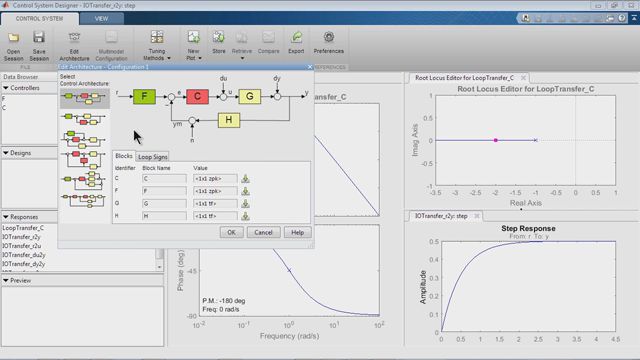
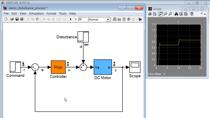
控制系统工具箱可以让你轻松地调整PID控制器的增益。如果你有一个工厂模型,就可以发动PID调节器应用此工厂模型。当它打开时,它会自动调整PID增益为你实现的性能和稳定性的平衡。你可以快速尝试不同的控制器类型,如仅按比例,比例积分,和PID。
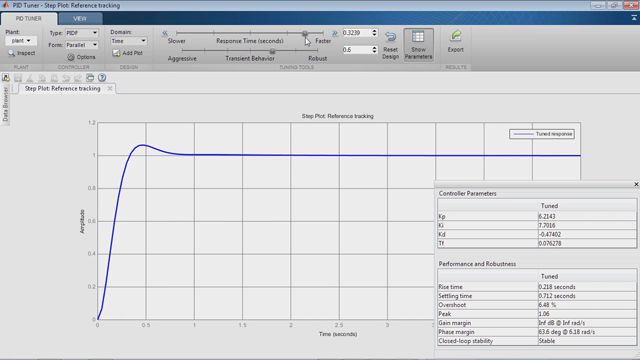
您可以检查调整PID增益以及性能和耐用性等特点,比赛时间,稳定时间,过冲,增益裕度和面部保证金。您可以使用交互式滑块来调整系统性能。您可以调整的响应时间与第一滑块与第二个脸保证金。除了建立响应曲线,你也可以看看你的系统的身体曲线。
你也可以看看不同的反应。默认情况下,PID调谐器应用程序显示使用参考罢工响应。但您可以选择查看其他响应,如控制器努力和输入输出干扰抑制。你可以同时看几个情节。使用这些响应,您可以调整控制器性能,以获得最佳的设置点跟踪或干扰抑制结果。
一旦你满意的设计方案,可以将PID控制器导出到MATLAB,它将被表示为PID对象。除了PID调谐器的应用程序,控制系统工具箱还提供了一个函数,该函数用于调谐PID增益相同的功能。该功能被称为PID调节。
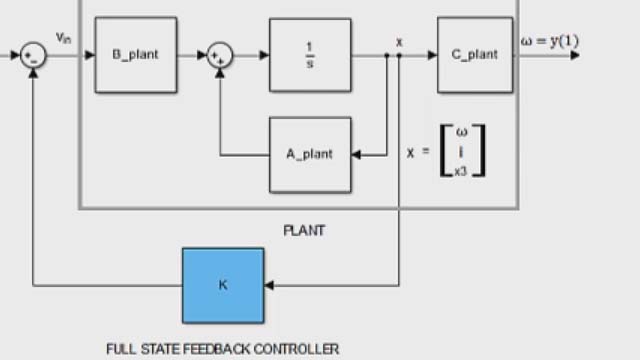
你可以调用这个函数与工厂模型作为输入参数来设计默认PID控制器,或者你也可以指定所需的增益交叉频率。函数的输出是由PID对象表示的调谐PID控制器。一旦你在MATLAB工作空间中有一个PID对象,你可以轻松地访问,如果需要,修改个人收益。
您可以使用PID对象像任何其他LTI模型。例如,你可以计算闭环传递函数,并绘制了阶跃响应。这结束了视频。
产品聚焦
其他资源
相关视频和网络研讨会













您还可以选择从下面的列表中的网站: