火星任务机器人挑战:为机器人建立位置估计器
从系列:火星任务机器人挑战
马修Cuenant, MathWorks
Corine Chancerel, MathWorks
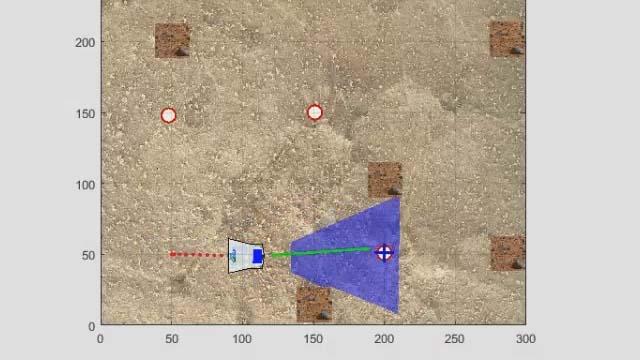
概述一种轮式机器人的简单位置估计器,即基于相对车轮角度信息评估机器人绝对位置的算法。
产品集中






相关视频和网络研讨会













你也可以从以下列表中选择一个网站:
从系列:火星任务机器人挑战
马修Cuenant, MathWorks
Corine Chancerel, MathWorks
概述一种轮式机器人的简单位置估计器,即基于相对车轮角度信息评估机器人绝对位置的算法。
你也可以从以下列表中选择一个网站: