视频和网络研讨会
从系列中:学生竞赛:移动机器人训练
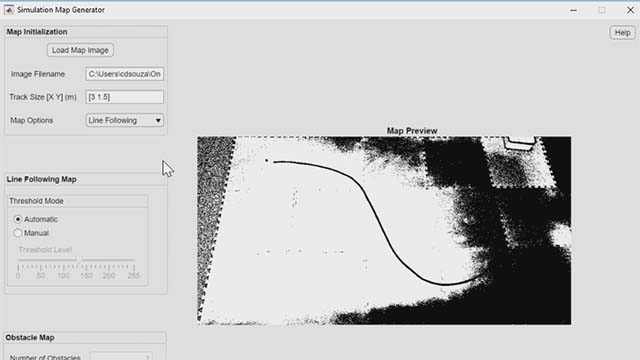
学习如何设计和调整PID控制器来执行导航任务,如航迹推算。
您将了解开环和反馈控制设计之间的区别,以及为什么后者在获得准确结果方面更有效。然后您将学习如何在Simulink中使用PID块万博1manbetx®针对航位推算问题设计了反馈控制回路。
移动机器人训练工具箱将用于模拟目的。
以VEX EDR机器人为例,在Simulink中演示了PID块实现的航位推算算法的性能。万博1manbetx
额外的资源:
记录时间:2017年6月27日
基于MATLAB的桥接无线通信设计与测试
反馈
特色产品
查看更多相关视频
选择网站
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:.
您也可以从以下列表中选择一个网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
联系当地办事处