updateObstacleGeometry
更新几何性质的障碍
语法
描述
updateObstacleGeometry (更新几何参数在胶囊列表中指定的障碍。如果ID指定的障碍已经不存在,添加一个新的功能障碍与ID列表。capsuleListObj,obstacleIDs,geomStruct)
状态= updateObstacleGeometry (capsuleListObj,obstacleIDs,geomStruct)
例子
建立自我身体路径和检查与障碍物的碰撞
建立一个自我身体路径和维护使用障碍状态dynamicCapsuleList对象。可视化的环境中的所有对象在不同的时间戳。验证自我身体的路径通过检查与障碍物碰撞的环境。
创建dynamicCapsuleList对象。提取步骤使用的最大数量随着时间戳你的对象数量的路径。
obsList = dynamicCapsuleList;numSteps = obsList.MaxNumSteps;
增加自我的身体
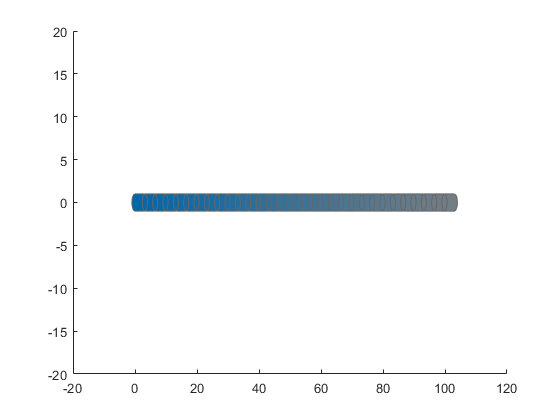
定义一个自我身体通过指定ID,在结构几何和状态。胶囊几何长度3米,半径1米。国家指定为一个线性路径x= 0 mx= 100。
egoID1 = 1;几何学=结构(“长度”3,“半径”,1“FixedTransform”、眼睛(3));州= linspace (0, 1, obsList.MaxNumSteps)”。* (100 0 0);egoCapsule1 =结构(“ID”egoID1,“州”州,“几何”、几何学);addEgo (obsList egoCapsule1);显示(obsList“步伐”(1:numSteps));ylim (20 [-20])
添加障碍
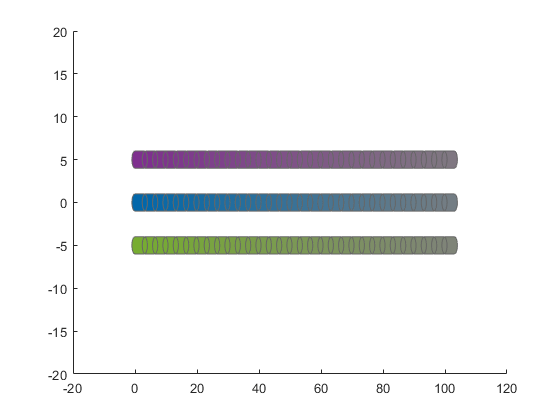
指定国家自我身体分开的两个障碍5 m在相反的方向y设在. .假设的障碍有相同的几何几何学身体的自我。
obsState1 =州+ [0 5 0];obsState2 =州+ [0 5 0];obsCapsule1 =结构(“ID”,1“州”obsState1,“几何”、几何学);obsCapsule2 =结构(“ID”2,“州”obsState2,“几何”、几何学);addObstacle (obsList obsCapsule1);addObstacle (obsList obsCapsule2);显示(obsList“步伐”(1:numSteps));ylim (20 [-20])
更新障碍
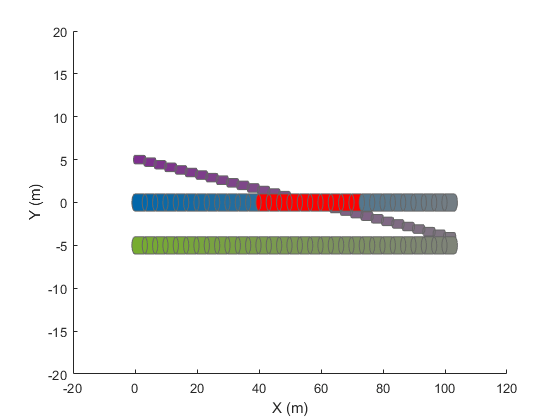
随着时间的推移改变你的障碍位置和几何尺寸。使用前面生成的结构,修改字段,并使用更新障碍updateObstacleGeometry和updateObstaclePose对象的功能。减少了半径0.5米的第一障碍,并改变对自我身体的路径移动它。
obsCapsule1.Geometry。半径= 0.5;obsCapsule1。州=…[linspace(0100年,numSteps)”…% xlinspace (5 4 numSteps) '…y %0 (numSteps 1)];%θupdateObstacleGeometry (obsList 1 obsCapsule1);updateObstaclePose (obsList 1 obsCapsule1);
检查碰撞
可视化的新路径。展示自我的身体和一个障碍之间的碰撞,其中用红色突出显示。注意,不检查障碍之间的碰撞。
显示(obsList“步伐”(1:numSteps),“ShowCollisions”1);ylim(20[-20])包含(“X”(m))ylabel (“Y (m)”)
通过使用编程方式检查碰撞checkCollision对象的功能。函数返回一个向量的逻辑值,表明每个时间步的状态。向量是转置显示的目的。
碰撞= checkCollision (obsList) '
碰撞=1 x31逻辑阵列0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0
验证路径与大量的步骤,使用任何碰撞函数向量的值。
如果任何(碰撞)disp (“碰撞检测。”)结束
碰撞检测。
更新自我的道路
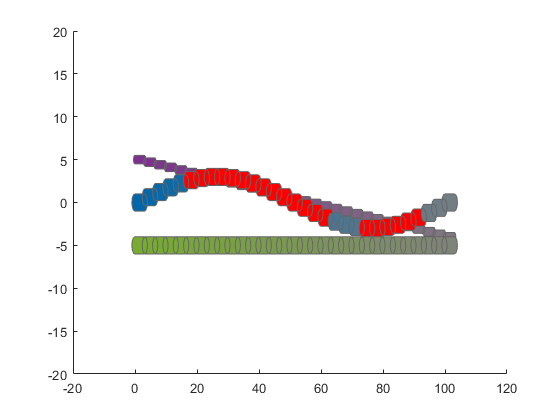
指定一个自我身体的新路径。可视化的路径,显示碰撞。
egoCapsule1。州=…[linspace(0100年,numSteps)”…% x3 * sin (linspace(0, 2 *π,numSteps))”…y %0 (numSteps 1)];%θupdateEgoPose (obsList 1 egoCapsule1);显示(obsList“步伐”(1:numSteps),“ShowCollisions”1);ylim (20 [-20])