 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 人在仿真软件万博1manbetx
人在仿真软件万博1manbetx 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー现在是实时时间!
今天,我很高兴地欢迎客座博主莎拉·达恩,从MathWorks咨询服务谈论实时仿真与测试.
为什么实时?
在MathWorks咨询服务公司工作时,我最喜欢的事情之一就是帮助客户进行实时模拟和测试。由于本博客之前没有讨论过这项技术的许多方面,所以我将介绍一个利用了许多优点的设计任务万博1manbetx实时仿真软件和实时仿真与测试.
设计任务
让我们从一个例题开始:盖伊和我决定我们真的需要开发一种设备,可以从厨房为我们取饮料,节省我们自己站起来、走着去取的巨大消耗。
在非常高的层次上,该系统包括两个部分:
- 一个可以走(或滚,或飞)到厨房,拿到要求的饮料,然后送到我们这里的物理设备;
- 控制物理设备动作的嵌入式控制器。
由于Guy是一名机械工程师,而且在这方面比我强得多,所以我请他开发物理设备(控制设计术语中的“工厂”)。我要开发控制器。
桌面模拟
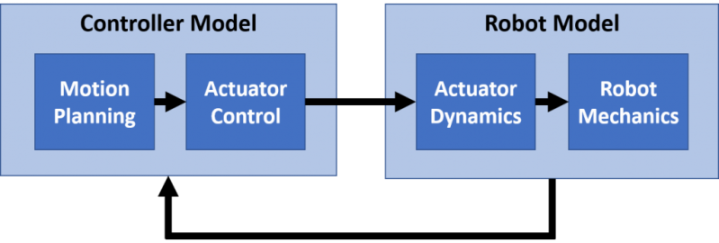
不出所料,盖伊很快就给我寄来了他的机器人的仿真模型。在我们投入最终系统的生产之前,我们希望确保物理设备和控制器能够正确地相互作用。同时,我开发了一个模型中的控制算法。
通过模型引用,将设备模型和控制器模型连接起来,对整个系统进行仿真。

经过几轮迭代后,我们有了一个我们认为可行的设计。
接下来我们要做什么?
让我们实时!
为了实时模拟我们的模型,我们将使用万博1manbetx实时仿真软件.使用Sim万博1manbetxulink Real-Time,只需一次单击,模型就会生成C代码,下载到专用系统中,并实时执行。一旦可执行文件在目标上运行,我们就可以执行自动化或交互式测试,并创建用于监视和控制实时应用程序的工具。
作为计算机专用的目标硬件,我们将使用Speedgoat移动实时目标机.

想知道Speedgoat是什么?Speedgoat生产一系列实时目标计算机,并提供大量硬件I/O连接模块。Speedgoat目标计算机是专门设计和优化的工作与Simulink实时无缝。万博1manbetx
现在我们来谈谈我们的准备工作。当我们谈到实时模拟和测试时,有3个基本配置:
- 快速原型:在实时目标计算机上对控制器进行仿真,并将真实的物理设备连接到控制器上。
- 半:在实时目标计算机上对该装置进行仿真,并与实际的嵌入式控制器硬件连接。
- 所有的模拟:该装置在一台实时目标计算机上模拟,控制器在另一台实时目标计算机上模拟,两者之间有电气连接。
让我们看看如何将它们应用到我们的项目中。
所有的模拟
这家伙正在制造实体机器人,我为控制器选择了一个嵌入式目标硬件。我们已经就控制器和物理机器人之间的传感器反馈和控制信号的电气接口达成了一致。在我们收到所有需要的机械和电子部件之前,我们想继续改进我们的设计。
对于所有的模拟设置,我们有两台来自Speedgoat的实时目标计算机。我们决定使用移动实时目标机器,因为我们希望能够通过我们的模拟进行现场测试,坚固的移动设计非常适合这一点。而且,他们真的很好看。每个目标机器都有一个模拟输入/输出卡,我们选择它是因为它模拟了我们将在饮料抓取机器人中使用的真实硬件的电气特性。我添加了I/O连接到控制器和工厂模型的电气接口。
这张图片显示了在实时模拟目标计算机上的设备和控制器的设置:
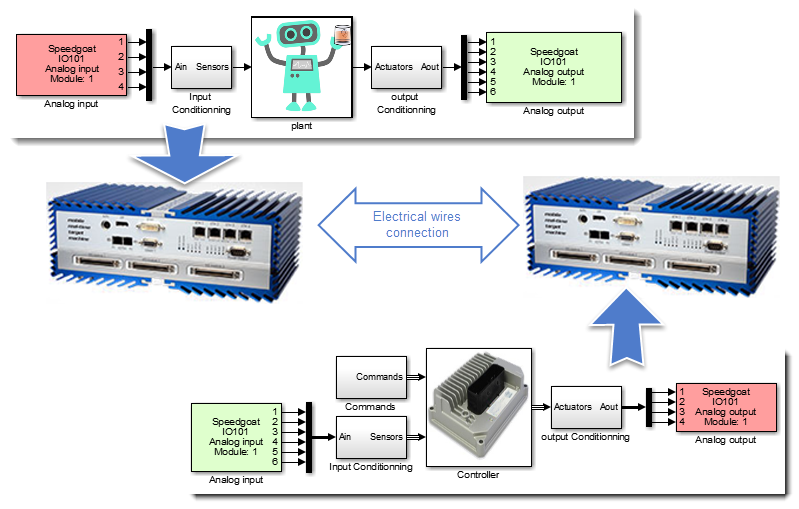
我们对这个实时配置的测试显示,我们没有正确地将电信号转换成工程单元——很高兴我们现在发现了这一点!我们修复了错误并继续进行成功的测试。
快速控制原型
在我的控制器硬件交付之前,Guy已经完成了第一个实体机器人的制造。我们都渴望继续开发,现在我们可以测试我的控制器设计,看看它是否真的能够控制Guy的机械创造的位置。
对于这个配置,我们将Speedgoat目标硬件替换为真实的物理机器人来模拟工厂。他还没有嵌入式控制器,所以我们将使用第二个Speedgoat目标计算机作为控制器。我们建立了一些测试装置并连接了机器人和Speedgoat目标计算机之间的I/O连接。
下面的图片显示了这个设置:
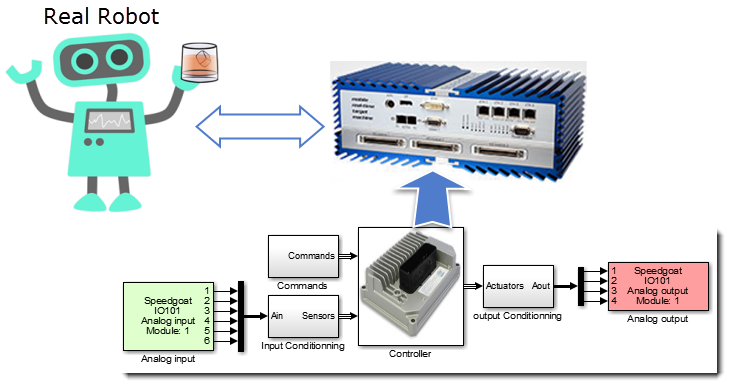
多亏了我们已经完成的所有预先模拟和测试,盖伊和我发现我们试图控制机器人位置的初始测试相当成功。不过,控制似乎有点迟缓,我认为在看到它在真实物理设备上的表现后,我可以改进算法。因为我不需要经历整个嵌入式代码生成过程,所以我能够快速地对控件进行更改,并立即测试性能。万博1manbetxSimulink real允许我轻松地实时调整参数,所以我可以调整我的控制器,而无需重新生成任何代码!
半
我的控制器硬件终于到了。在完善的控制算法设计就绪后,我生成嵌入式代码并部署到新的生产目标中。
我打电话给盖伊,让他知道是时候用他的机器人测试我真正的控制器了——但盖伊对这件事有他自己的看法。他还没准备好让我危及他的机器人杰作除非我向他证明控制器部署没有问题。
没问题,我可以使用Speedgoat目标计算机和Simulink Real-Time来模拟物理机器人,并将它连万博1manbetx接到我的嵌入式控制器,并使用硬件在环(HIL)模拟来测试控制器。我创建了一个大型测试套件,其中包括一些非常大胆的测试用例,以确保控制设计是健壮的和容错的(这就像美味的饮料一样危险!)
以下是《HIL》模拟设置:
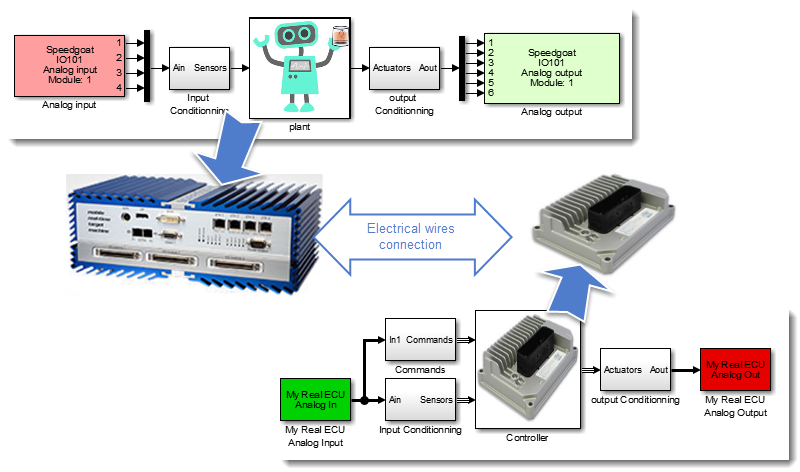
印证家伙坚持边境的测试,我们发现错误的传感器反馈信号的某些组合可以使控制器命令机器人一个不稳定的位置,我们的工厂模型显示可能导致机器人洒上饮料本身——不利于我们的饮料,为机器人,肯定不是好!我为这种情况添加了额外的安全逻辑,并将更新部署到控制器。
在经过HIL测试后,我对我的控制器的性能感到满意,并有信心该系统将能够处理与真正的机器人进行积极的现场测试。
最后……
第二天,盖伊带来了机器人,我们集成了嵌入式控制器。我们对我们久经考验的系统充满信心,自豪地坐下来,等待我们的饮料送到。

现在轮到你了……
你在设计过程中使用实时模拟和测试吗?你想阅读更多关于使用Simulink实时的信息吗?万博1manbetx请在下方留言!






评论
要留下评论,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。