机器人编程包括编写计算机程序,使机器人能够感知环境,制定计划和决策,并执行任务。例如,为地面机器人编程,使其在建筑物内自主导航,需要传感和感知、定位和绘图、路径规划和路径跟踪、执行器控制和其他任务。
机器人编程通常涉及:
- 使机器人能够通过使用计算机视觉和深度学习算法来感知环境,用于对象检测,分类和跟踪以及运动估计
- 通过算法实现机器人自主权同步定位和绘图(SLAM),避免碰撞和运动规划
- 通过设计模型预测控制,计算的转矩控制和路径等控制系统来控制机器人的行为
- 与不同嵌入式平台(如cpu、gpu、fpga和微控制器)连接的传感器和执行器进行通信和接口
在开始机器人编程时,工程师通常会开发机器人预期行为的状态机图。此外,编程语言,如C/ c++, Python®,java.®和matlab.®用于算法开发,中间件如机器人操作系统(ROS)用于硬件抽象,低级设备控制,流程之间的消息和硬件部署。
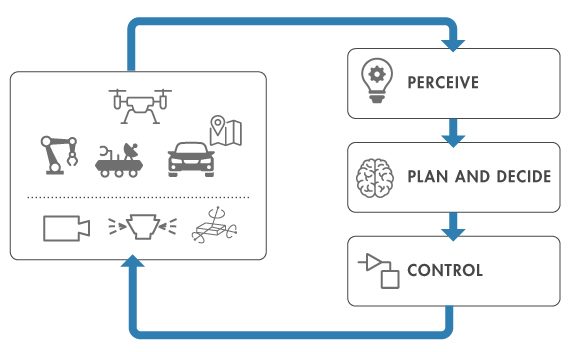
一个常见的机器人编程工作流程。
一个步骤的错误往往会影响整个机器人编程工作流。软件中的建模和仿真通过在原型制作过程中识别问题,而不是在生产机器人或更糟的是在现实环境中使用机器人时识别问题,有助于消除实现错误。模拟系统还可以帮助工程师通过调整控制参数来优化系统设计,而不必担心平台依赖或访问机器人硬件。
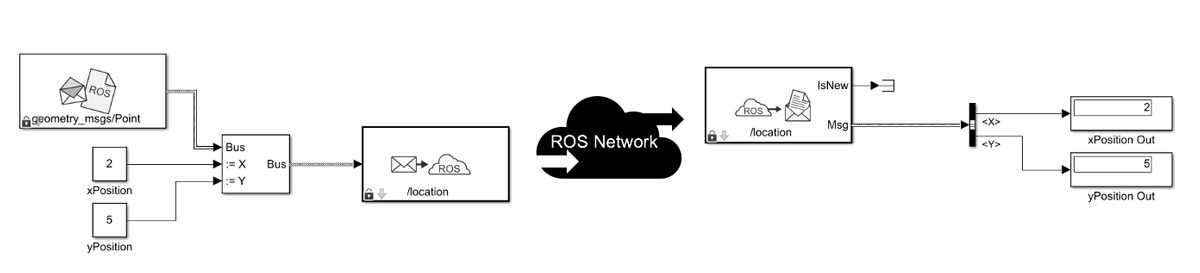
MATLAB为机器人编程提供了几种内置算法和功能。例如,只需在Matlab中的几行出开箱即用的深层学习算法,机器人可以识别环境中的对象.万博1manbetx动态仿真模块®提供用于使用基于模型设计的建模和仿真的预设块,用于机器人编程。例如,Simulink中的ROS块使万博1manbetx能器材编程器能够订阅传感器数据并在没有编写代码的情况下通过ROS网络发布机器人命令。
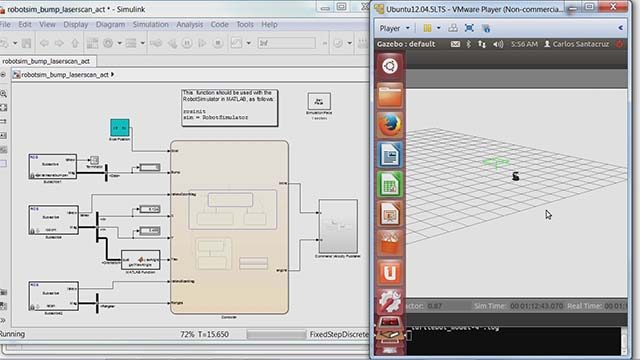
使用MATLAB和SIMULINK万博1manbetx用于机器人编程,您可以构建一个可扩展机器人仿真原型,测试概念模型,廉价地调试。然后,您可以使用高保真模型进行验证,同时保持其余算法在同一模拟环境中。一旦在机器人仿真中获得了所需结果,就可以以共同的编程语言从Simulink模型生成嵌入式系统的独立可执行代码。万博1manbetx使用从MATLAB和SIMULINK到ROS网络的ROS连接,您可以直接从MATLAB万博1manbetx和SIMULINK生成C ++ ROS节点以测试和验证启用ROS的机器人和机器人模拟器等应用程序,如凉亭。
有关机器人编程的更多详细信息,请参阅机器人系统工具箱™那导航工具箱™那ROS工具箱那马铃薯,万博1manbetx.
{kind=link}