机器人操作系统(ROS)支持ROS工具箱万博1manbetx
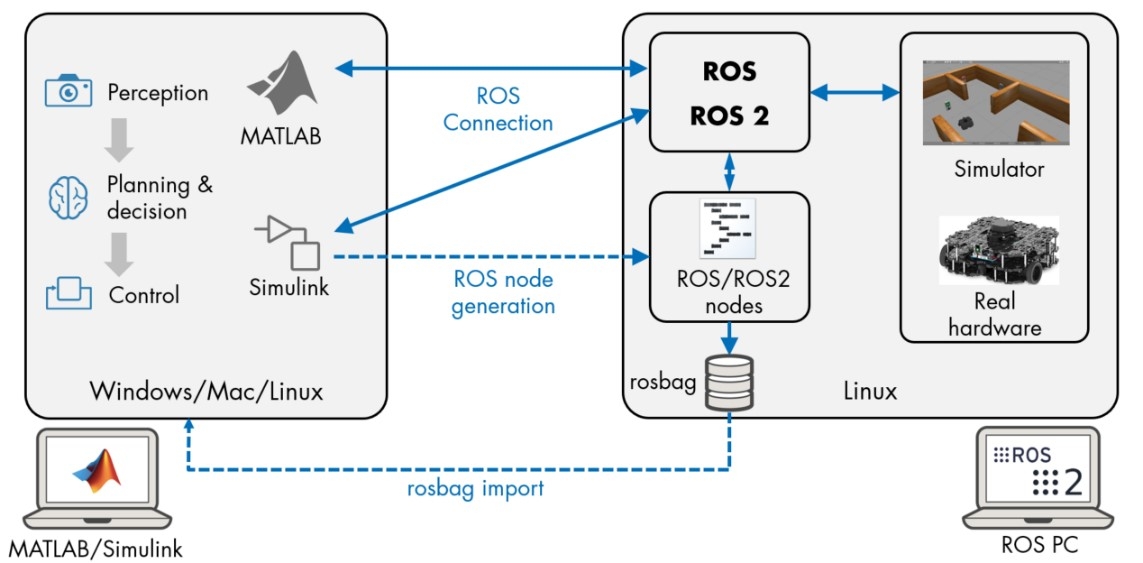
在MATLAB和Simulink中创建ROS节点,与ROS和R万博1manbetxOS 2网络上的其他节点交换消息,将ROS log (rosbag)文件导入MATLAB和Simulink中,生成独立ROS节点的c++代码。
- 来自ROS工具箱的TurtleB万博1manbetxot机器人支持
- 机器人操作系统(ROS)支持ROS工具箱万博1manbetx
- 机器人系统工具箱中的机器人机械手支持万博1manbetx
功能和特性
ROS工具箱提供一个接口MATLAB®和万博1manbetx®以及机器人操作系统(ROS),它使您能够与ROS和ROS 2网络通信,交互式地探索机器人功能,并可视化传感器数据。您可以在支持ros的机器人和机器人模拟器(如Gazebo)上开发、测试和验证机器人算法和应用程序。您还可以直接在MATLAB和Simulink中创建一个自包含的ROS网络,并导入ROS日志文件(rosbags)来可视化、分析和处理日志数据。万博1manbetx例如,你可以阅读一批图像来标记和训练神经网络。这些功能允许您在MATLAB和Simulink中开发您的机器人算法,同时使您能够与ROS网络上的其他节点交换消息。万博1manbetx工具箱还支持万博1manbetx大量现有消息类型集.使用ROS自定义消息生成功能,您可以扩展此集合以包括自定义消息类型。您可以定义自己的自定义ROS和ROS 2消息和服务类型,并在MATLAB和Simulink中使用它们与ROS网络中的其他节点通信。万博1manbetx您可以与其他MATLAB用户共享生成的自定义消息接口。与万博1manbetx仿真软件编码器®,你可以从Simulink模型中为一个可以在任何Linux上运行的独万博1manbetx立ROS应用程序生成c++代码®平台,如安装了ROS的树莓派。
主要功能允许您:
- 与ROS网络通信,交互式地探索机器人能力,并可视化传感器数据
- 直接从MATLAB和Simulink创建ROS节点、发布者和订阅者万博1manbetx
- 从MATLAB和Simulink创建和发送ROS消息万博1manbetx
- 从MATLAB和Simulink创建和发送ROS自定义消息万博1manbetx
- 呼叫并提供ROS服务
- 导入ROS日志文件(rosbags),以可视化、分析和后处理日志数据
- 在任何平台(Windows)上使用ROS功能®Linux, Mac)
- 使用MATLAB作为ROS master
- 在支持ros的机器人和机器人模拟器(如Gazebo和V-REP)上测试和验证应用
- 创建与ROS网万博1manbetx络一起工作的Simulink模型
- 从Simulink模型生成一个独立的ROS c++节点万博1manbetx
关于机器人操作系统(ROS)
机器人操作系统(ROS)是一个开源的元操作系统,它允许机器人系统的不同组件以消息的形式交换信息。组件通过将消息发布到特定的主题(如“/odometry”)来发送消息。其他组件通过订阅该主题来接收消息。ROS提供的服务包括硬件抽象、常用功能的实现、可视化、低级设备控制、进程间的消息传递和包管理。
探索图库(5张图片)
你也可以从以下列表中选择一个网站: