扩展对象跟踪雷达和摄像头的公路车辆仿真软件万博1manbetx
这个例子向您展示了如何跟踪高速公路车辆在自我车辆仿真软件。万博1manbetx在本例中,您使用多个扩展对象跟踪技术跟踪高速公路车辆和评估他们的跟踪性能。这个例子密切遵循扩展对象的高速公路车辆跟踪雷达和摄像头(传感器融合和跟踪工具箱)MATLAB®的例子。
对象和对象跟踪延伸
跟踪的对象,对象扩展对象的维度跨越多个传感器分辨率的细胞。因此,传感器报告多个检测每个对象在一个单一的扫描。使用高分辨率传感器的关键好处是获得更多关于对象的信息,比如尺寸和取向。这些额外的信息可以提高检测的概率,减少误警率。例如,下图描述多个检测单个车辆跨越多个雷达分辨率的细胞。

在全球最近邻等传统跟踪方法,联合概率数据关联和multi-hypothesis跟踪,跟踪对象是假定返回一个每个传感器扫描检测。高分辨率传感器报告扫描中的多个返回每个对象出现新的挑战传统的追踪。在某些情况下,集群传感器数据可以提供传统的追踪与单个检测每个对象。然而,通过这样做,使用高分辨率传感器的好处可能会丢失。
扩展对象跟踪器可以处理多个检测每个对象。此外,这些追踪器不仅可以估计运动状态,如物体的位置和速度,而且物体的尺寸和取向。在这个例子中,您跟踪车辆在自我车辆使用下面的追踪器:
传统的多目标跟踪器使用一个点目标模型,多目标跟踪。
GGIW-PHD追踪,概率假设密度(博士)追踪(传感器融合和跟踪工具箱)高斯射线wishard逆
ggiwphd)过滤器。GM-PHD追踪,概率假设密度(博士)追踪(传感器融合和跟踪工具箱)用高斯混合(
gmphd使用矩形目标模型)滤波器。
您将使用评估结果最优的子模式的任务指标(传感器融合和跟踪工具箱),它提供了一个综合分数占错误赋值和距离。一个较低的分数意味着更好的跟踪。
模型的概述
load_system (“ExtendedObjectTrackingIn万博1manbetxSimulink”);set_param (“ExtendedObjectTrackingIn万博1manbetxSimulink”,“SimulationCommand”,“更新”);open_system (“ExtendedObjectTrackingIn万博1manbetxSimulink”);
![]()
这个模型有三个子系统,每个实现工作流的一部分:
模拟场景和传感器
跟踪算法
跟踪性能和可视化
模拟场景和传感器
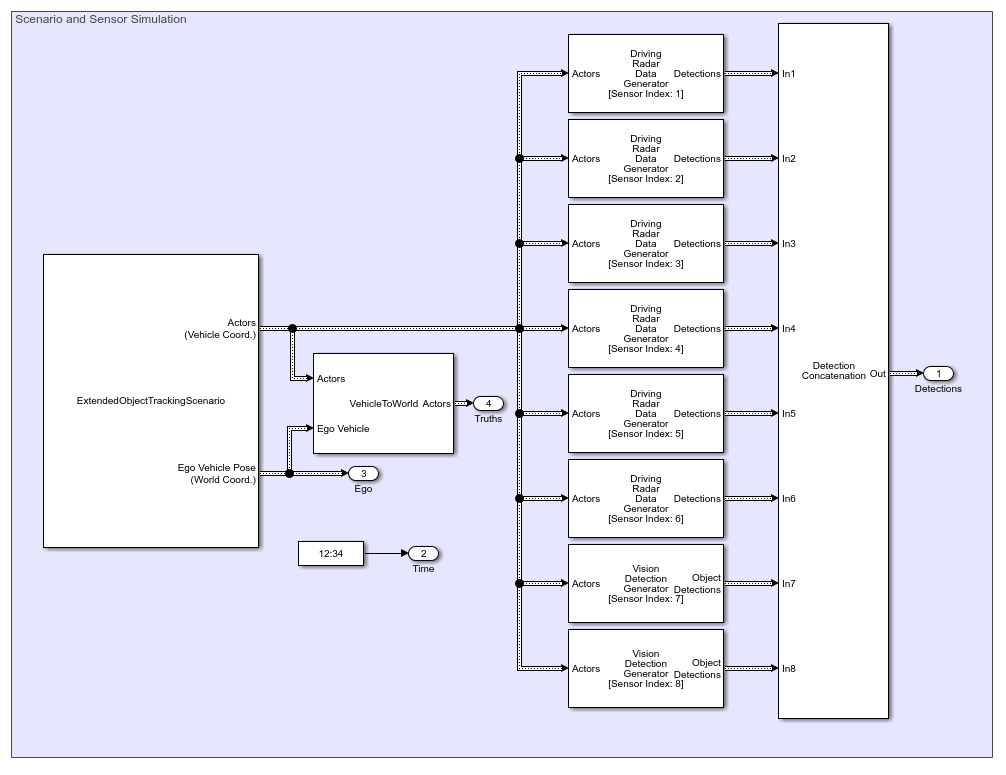
的场景的读者块读取drivingScenario对象从工作区并生成演员和自我车辆位置数据探索仿真软件总线万博1manbetx功能(万博1manbetx模型)对象。汽车世界阻止演员从车辆位置坐标转换为世界坐标。的驾驶雷达数据生成器块模拟雷达探测和视觉检测发电机模拟摄像头检测。检测的传感器被组合在一起使用检测连接块。
在该方案中有一个自我车辆和四个其他车辆:自我车的前车在中间车道,车辆在自我中心车辆车道,前方一辆卡车的自我在右车道车辆,并在左边的车道超车车辆。
在本例中,您模拟一种自我工具六个雷达传感器和两个视觉传感器覆盖360度的视野。传感器有一定的覆盖重叠和空白。自我车辆配备远程雷达传感器和视觉传感器在车辆的正面和背面。两边的车辆两枚短程雷达传感器分别覆盖90度。从中间的两个传感器覆盖的车辆,和其他传感器覆盖从中间的车前面。

跟踪算法
实现三种不同的扩展对象跟踪算法子系统使用变体。看到使用变体子系统实现变化在不同的层次结构(万博1manbetx模型)为更多的信息。子系统有一个变体子系统(万博1manbetx模型)为每个跟踪算法。您可以选择跟踪算法通过改变工作空间变量的值跟踪器。的默认值跟踪器是1。
![]()
![]()
点对象跟踪
![]()
在本节中,您使用多目标跟踪块来实现基于点目标模型的跟踪算法。从雷达检测预处理包括自我车辆使用辅助INS信息预处理检测块。块实现使用MATLAB系统(万博1manbetx模型)块。代码块中定义的helper类helperPreProcessDetections。每个传感器多目标跟踪器假设一检测对象,并使用一个全球最近邻关联检测跟踪方法。它假设每个对象都可以检测到传感器的扫描最多一次。然而,模拟雷达传感器有足够高的分辨率和生成多个检测每个对象。如果这些检测不是集群,跟踪生成多个追踪每个对象。集群返回一个检测每个集群,协方差的成本有较大的不确定性和失去真正的信息对象维度。集群也很难区分两个物体相互接近时,例如,当车辆通过另一辆车。
集群雷达检测,配置驱动雷达数据发生器块输出集群检测而不是检测。要做到这一点,你设置TargetReportFormat块的参数集群检测。在模型中,这是通过指定块的参数InitFcn回调点对象的跟踪子系统。看到模型的回调(万博1manbetx模型)关于回调函数的更多信息。
下面的动画显示,随着集群,跟踪器可以在现场跟踪的对象。相关的跟踪超车车辆(黄色)从车辆的前面的场景后面的车辆。初的场景中,自我背后的超车车辆车辆(蓝色),所以雷达和视觉检测是由它的前面。当超车车辆通过自我车、雷达探测是由超车的车辆,然后从它回来。你也可以观察到集群并不完美。当路过的车辆通过自我背后的车辆,车辆(紫色),追踪都是略微转向左边由于不完美的集群。
![]()
GGIW-PHD扩展对象跟踪
![]()
在本节中,您使用一个概率假设密度(博士)追踪(传感器融合和跟踪工具箱)跟踪器块实现扩展的对象跟踪算法ggiwphd(传感器融合和跟踪工具箱)滤波器跟踪对象。从雷达检测预处理包括自我车辆使用辅助INS信息预处理检测块。块实现使用MATLAB系统(万博1manbetx模型)块。代码块中定义的helper类helperPreProcessDetections。它还输出所需的传感器配置跟踪计算密度的每个组件的检测能力。
您指定的传感器配置博士跟踪器块的参数作为一个结构字段一样trackingSensorConfiguration(传感器融合和跟踪工具箱)并设置FilterInitializationFcn字段作为helperInitGGIWFilter和SensorTransformFcn字段作为ctmeas。这是通过指定的模型InitFcn回调的GGIW博士跟踪子系统。看到模型的回调(万博1manbetx模型)关于回调函数的更多信息。
与多目标跟踪,维护一个假设每个轨道,GGIW-PHD是一个多目标滤波器,描述了概率假设密度(博士)的场景。GGIW-PHD过滤器使用这些分布模型扩展的目标:
γ:表示预期数量的检测传感器从扩展对象。
高斯:代表了扩展对象的运动状态。
Inverse-Wishart:代表了空间目标的程度。在二维空间中,在多大程度上是由一个2×2随机正定矩阵,它对应于一个二维椭圆描述。在三维空间中,在多大程度上是由3 x3的随机矩阵,它对应于一个三维椭球描述。这些随机的概率密度矩阵给出Inverse-Wishart分布。
模型假定每个分布是相互独立的。因此,概率假设密度(博士)GGIW-PHD过滤器所描述的概率密度函数的加权和的几个GGIW组件。点对象跟踪器相比,假设一个分区检测,博士跟踪创建多个可能的分区的一组检测和评估它对当前博士过滤器组件。你指定一个PartitioningFcn创建探测分区,它提供了多个假设集群。
下面的动画显示GGIW-PHD可以处理多个检测/对象/传感器,而不需要集群这些检测。此外,通过使用多个检测,跟踪估计位置,速度,每个对象的维度,和方向。图中的虚线椭圆形状展示了预期的目标。
GGIW-PHD过滤器假设检测是分布式目标的椭圆中心周围。因此,跟踪倾向于跟随车辆的可见部分。这些可观测的部分包括后方的车辆直接提前自我车辆或车辆的正面直接背后的自我。跟踪器可以更好的近似附近车辆的长度和宽度,使用椭圆。在仿真,例如,追踪生产更好的椭圆重叠与过往车辆的实际大小。
![]()
GM-PHD矩形对象跟踪
![]()
在本节中,您使用一个概率假设密度(博士)追踪(传感器融合和跟踪工具箱)跟踪器块用gmphd使用一个矩形目标模型滤波器跟踪对象。不像ggiwphd,它使用一个椭圆形状估计对象范围,gmphd允许您使用一个高斯分布来定义你的选择的形状。您定义一个矩形目标模型利用运动模型,ctrect(传感器融合和跟踪工具箱)和ctrectjac(传感器融合和跟踪工具箱)和测量模型,ctrectmeas(传感器融合和跟踪工具箱)和ctrectmeasjac(传感器融合和跟踪工具箱)。
传感器配置为博士跟踪定义除了的定义是相同的SensorTransformFcn和FilterInitializationFcn字段。你设置FilterInitializationFcn字段作为helperInitRectangularFilter和SensorTransformFcn字段作为ctrectcorners。这是通过指定的模型InitFcn回调的通用博士跟踪子系统。看到模型的回调(万博1manbetx模型)关于回调函数的更多信息。
下面的动画显示GM-PHD还可以处理多个检测/对象/传感器。GGIW-PHD类似,它也估计物体的大小和方向。过滤器的初始化函数使用类似的方法GGIW-PHD追踪和初始化多个不同大小的组件。
可以看到,估计,建模为矩形,有很好的适应地面实况模拟对象,描绘的纯色补丁。特别是,轨道能够正确跟踪车辆的形状以及它们的运动中心。
![]()
跟踪性能和可视化

您使用的评估每个算法的性能最优子模式分配(OSPA)指标。OSPA度量目标跟踪系统的性能评价与标量成本通过结合不同的错误组件。
![]()
在哪里![]() ,
,![]() ,
,![]() 是本地化、基数和标签错误组件和pOSPA指标的顺序。看到
是本地化、基数和标签错误组件和pOSPA指标的顺序。看到trackOSPAMetric(传感器融合和跟踪工具箱)为更多的信息。

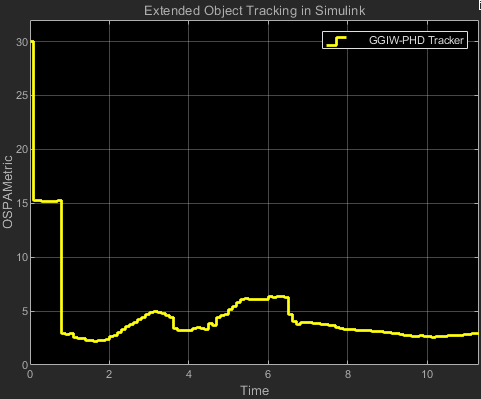

你设置距离类型参数自定义和定义之间的距离函数跟踪及其相关地面真理的helperExtendedTargetDistancehelper函数。这个距离helper函数捕获位置,速度,维度和偏航误差之间的跟踪和一个关联的真理。OSPA度量范围块所示。每个单元在轴代表时间十步的场景。注意到OSPA指标降低,从而显示了性能改进当您切换点对象追踪GGIW-PHD追踪和GGIW-PHD GM-PHD跟踪器跟踪。使用辅助的场景可视化场景可视化,使用的实现MATLAB系统(万博1manbetx模型)块。代码块中定义的helper类helperExtendedTargetTrackingDisplayBlk。
bdclose (“ExtendedObjectTrackingIn万博1manbetxSimulink”);
总结
在这个示例中,您了解了如何跟踪对象返回多个检测在一个传感器扫描在仿真软件环境中使用不同的跟踪方法。万博1manbetx您还了解了如何使用OSPA评估跟踪算法的性能指标。
另请参阅
场景的读者|驾驶雷达数据生成器|视觉检测发电机|多目标跟踪|概率假设密度(博士)追踪(传感器融合和跟踪工具箱)|最优的子模式的任务指标(传感器融合和跟踪工具箱)