标记激光雷达点云的目标检测
的地面实况贴标签机App可以让你标记点云数据从激光雷达传感器获得。要标记点云,可以使用长方体,它是围绕点云中的点绘制的三维包围框。您可以使用长方体标签为训练对象探测器创建地面真实数据。
这个例子带领您通过使用长方体标记激光雷达点云数据。
建立激光雷达点云标记
加载一个点云序列到应用程序中,并定义一个长方体标签。
打开地面实况贴标签机在MATLAB中®命令提示符,输入此命令。
groundTruthLabeler
在应用程序工具条上,选择进口>添加信号.
在“添加/删除信号”对话框中,设置源类型来
点云序列.在文件夹名称参数,浏览
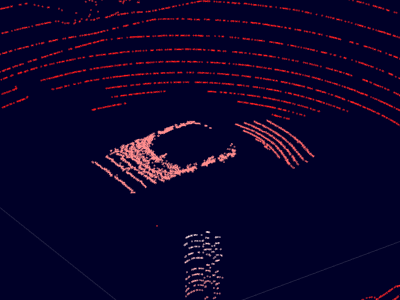
lidarSequence文件夹,其中包含点云序列。matlabrootmatlabroot函数。matlabroot\工具箱\ \ drivingdata \ lidarSequence开车点击添加源要加载点云序列,请使用默认时间戳。然后,单击好吧关闭“添加/删除信号”对话框。该应用程序显示序列中的第一个点云。
在ROI标签窗格在应用程序的左侧,单击标签.
创建一个
矩形或长方体标签命名车.点击好吧.
这个图显示了地面实况贴标签机按照以下步骤安装应用程序。

缩放、平移和旋转帧
缩放、平移和3-D旋转选项可以帮助您在点云中定位和标记感兴趣的对象。使用这些工具在第一个点云框架中放大自我车辆并居中。ego载具位于点云的原点。
在框架的右上角,单击“放大”按钮
 .
.点击“自我”飞行器,直到你被放大到足以看到那些点。

您还可以选择使用Pan按钮![]() 或旋转3D按钮
或旋转3D按钮![]() 帮助你查看更多的自我载体点。要查看查看或旋转点云的其他选项,请单击Rotate 3D按钮,然后右键单击点云框架。提供的选项与
帮助你查看更多的自我载体点。要查看查看或旋转点云的其他选项,请单击Rotate 3D按钮,然后右键单击点云框架。提供的选项与pcshow函数。
隐藏的地面
点云数据包括来自地面的点,这使得分离自我车辆点变得更加困难。该应用程序提供了一个选项来隐藏地面使用segmentGroundFromLidarData函数。
从点云中隐藏地面点。在应用程序工具条上,在激光雷达选项卡上,单击隐藏的地面.这个设置适用于点云中的所有帧。

此选项仅隐藏地面从显示。它不会从点云中移除地面数据。如果您标记了包含隐藏地面点的点云的一部分,当您导出地面真值标签时,这些地面点是该标签的一部分。
单击,配置地面隐藏算法地面设置并调整隐藏地面对话框中的选项。
标签长方体
用长方体标签标记自我载体。
在ROI标签窗格中,单击车标签。
选择激光雷达点序列帧通过单击lidarSequence选项卡。
请注意
要启用标记键盘快捷键,必须首先选择信号帧。
将指针移动到自我车辆上,直到灰色预览长方体包围自我车辆点。在预览的Cuboid Cuboid中括起来的点以黄色突出显示。
要调整预览长方体的大小,按住一个键,并向上或向下移动鼠标滚轮。
选项中调整预览长方体的大小x-,y,或z-方向时,上下移动滚轮,同时按住X,Y,或Z键,分别。
点击信号帧绘制长方体。因为缩小以适应选项是在应用程序工具条上被默认选中的,长方体收缩以适合它里面的点。




要更多地控制点云的标签,在应用程序工具条上,单击快速聚类.选中此选项进行标签时,长方体通过使用segmentLidarData函数。单击,配置点云集群集群设置并调整对话框中的选项。若要在帧之间导航时查看点云集群,请选择查看集群在此对话框中。在回放信号时,禁用点云集群的可视化。
修改长方体标签
绘制长方体标签后,可以调整长方体的大小或移动长方体以使标签更精确。例如,在前面的过程中缩小以适应选项收缩长方体标签,以适应所检测到的自我车辆点。实际的自我载体比这个长方体略大。扩大这个长方体的大小,直到它更准确地反映自我载体的大小。
若要启用点云标记键盘快捷键,请验证lidarSequence选项卡被选中。
在信号框中,单击绘制的长方体标签。拖动面可扩展长方体。
移动长方体直到它以自我载体为中心。持有转变并拖动长方体的面。
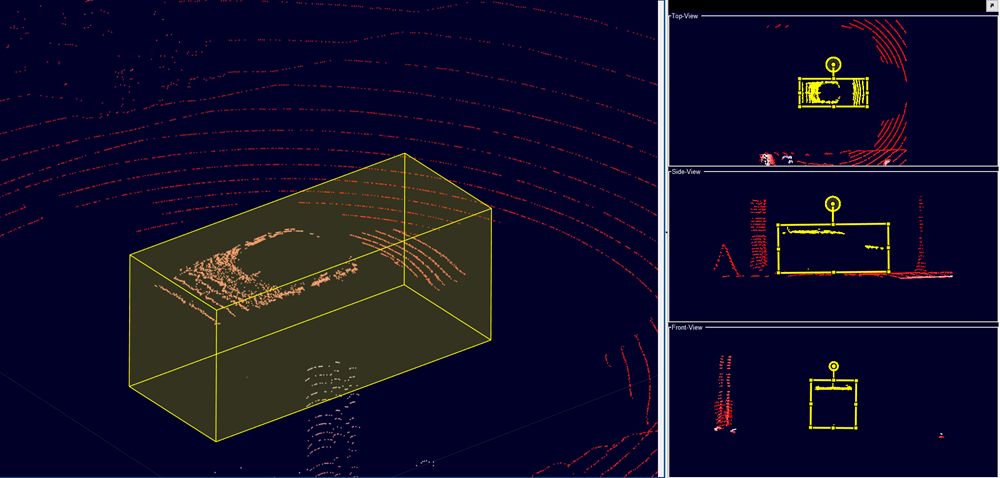
使用投影视图同时调整顶视图、侧视图和前视图中的长方体标签。下激光雷达选项卡中,选择投影视图选择从相机视图节,以启用该视图。



将长方体应用于多帧
在帧之间标记对象时,可以复制长方体标签并粘贴到其他帧上。
选择ego车辆的长方体并按下Ctrl + C复制它。
在应用程序的底部,单击Next Frame按钮
 导航到下一帧。
导航到下一帧。新闻Ctrl + V将长方体粘贴到框架上。
您还可以使用自动化算法对多个帧应用标签。该应用程序提供了一个内置的时间插值算法,用于在中间帧中标记点云。有关如何应用此自动化算法的示例,请参见为多个信号标记地面真相.
配置显示
该应用程序提供了额外的选项来配置信号帧的显示。
改变Colormap
控件上对点云显示的附加控制激光雷达选项卡,可以更改颜色映射选项。属性也可以更改颜色映射值Colormap价值参数,该参数有以下选项:
Z高度-颜色地图值沿增加z设在。当发现地面以上的物体时,如交通标志,选择此选项。径向距离-颜色地图值增加远离点云起源。当发现远离原点的物体时,选择此选项。
改变观点
在激光雷达选项卡的应用程序工具条相机视图部分包含更改查看点云的透视图的选项。这些观点集中在点云原点,这是自我载体的假定位置。
你可以从这些视图中选择:
鸟瞰-直接从自我飞行器上方观察点云。
追逐视图-从自我车后面几米处观察点云。
自我的观点-从自我车内观察点云。
投影视图—从俯视图、侧视图和前视图同时查看带长方体标签的点云。
这些观点假定车辆是沿正极行驶的x-点云的方向。如果车辆行驶在不同的方向,设置适当的选项自我的方向参数。
在验证点云标签时使用这些视图。在标记时避免使用这些视图。相反,使用默认视图,并通过使用平移、缩放和旋转选项来定位对象。
相关的话题
你也可以从以下列表中选择一个网站:
