trackErrorMetrics
跟踪错误和NEES
描述
的trackErrorMetrics系统对象™提供轨道和已知真实轨迹之间的定量比较。
要生成轨道分配指标:
创建
trackErrorMetrics对象并设置其属性。使用参数调用对象,就像调用函数一样。
有关系统对象如何工作的详细信息,请参见什么是系统对象?
创建
描述
errorMetrics= trackErrorMetricstrackErrorMetrics具有默认属性值的系统对象。
errorMetrics= trackErrorMetrics (名称,值)trackErrorMetrics使用一个或多个名称-值对。例如,metrics = trackErrorMetrics('MotionModel','constvel')创建一个trackErrorMetrics物体具有匀速运动模型。属性名用引号括起来。
属性
使用
要估计错误,请使用参数调用跟踪错误度量对象,就好像它是一个函数一样(在这里描述)。
语法
描述
[返回指标posRMSE,velRMSE,posANEES,velANEES] = errorMetrics(跟踪,trackIDs,真理,truthIDs)
posRMSE-位置均方根误差velRMSE-速度均方根误差posANEES-位置平均归一化估计误差的平方velANEES-速度平均归一化估计误差的平方
对于当前时间步长的匀速运动。trackIDs所有音轨的音轨标识符集。truthIDs是真值标识符的集合。跟踪是一组轨道,和真理是真理的集合。trackIDs而且truthIDs是否每个向量的对应元素都与轨道和真值标识符相匹配跟踪而且真理,分别。
不同状态下的RMSE和ANEES值是通过对当前时间步长所有航迹误差的平均值来计算的。例如,位置RMSE值,posRMSE,定义为:
在哪里米当前时间步长中与真值轨迹相关的轨道总数,和
轨道的位置和轨道的位置有区别吗我,p跟踪,我,以及对应真理的位置,p真理,我,在当前时间步长。其他状态的RMSE值(韦尔,pos,acc,yawRate)的定义相似。
位置ANEES值,posANEES,定义为:
在哪里Cp,我协方差矩阵是否与轨道位置对应我在当前时间步长。其他状态的ANEES值(韦尔,pos,acc,yawRate)的定义相似。
要启用此语法,请设置ErrorFunctionFormat财产“内置”和MotionModel财产“constvel”.
[还返回度量posRMSE,velRMSE,yawRateRMSE,posANEES,velANEES,yawRateANEES] = errorMetrics(跟踪,trackIDs,真理,truthIDs)
yawRateRMSE-偏航速率的均方根误差yawRateANEES-偏航率平均归一化估计误差的平方
对于在当前时间步长的恒定转动速率运动。
要启用此语法,请设置ErrorFunctionFormat财产“内置”和MotionModel财产“constturn”.
提示
这些用法语法只计算当前时间步长与真值相关的所有轨迹的RMSE和ANEES值。若要获得每个轨迹和真理的累积RMSE和ANEES值,请使用cumulativeTrackMetrics而且cumulativeTruthMetrics对象函数。要获得每个轨迹和真值的当前RMSE和ANEES值,请使用currentTrackMetrics而且currentTruthMetrics对象函数。
输入参数
输出参数
对象的功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,释放system对象的系统资源obj,使用这种语法:
发行版(obj)
例子
两个跟踪目标的分配和误差度量
检查跟踪两个目标的系统的分配和错误。
首先,加载存储的轨道数据。
负载trackmetricextracklogtruthlog
创建对象来分析赋值和错误度量。
tam = trackAssignmentMetrics;tem = trackErrorMetrics;
创建输出变量。
posRMSE = 0(数字(tracklog),1);velRMSE = 0(数字(tracklog),1);posANEES = 0(数字(tracklog),1);velANEES = 0(数字(tracklog),1);
遍历所有轨道到:
提取轨道和地面真相在我跟踪器更新。
分析并检索当前的真相跟踪分配。
分析所有轨道和真相的瞬时误差指标。
为我=1:数字(tracklog) tracks = tracklog{I};真相= truthlog{i};[trackAM,truthAM] = tam(轨道,真理);[trackIDs,truthIDs] = currentAssignment(tam);[posRMSE(我),velRMSE(我),posANEES(我),velANEES (i)) =...tem(跟踪、trackIDs真理,truthIDs);结束
显示轨道指标表。
trackMetricsTable (tam)
ans =4×15表TrackID AssignedTruthID幸存TotalLength DeletionStatus DeletionLength DivergenceStatus DivergenceCount DivergenceLength RedundancyStatus RedundancyCount RedundancyLength FalseTrackStatus FalseTrackLength SwapCount _______ _______________ _________ ___________ ______________ ______________ ________________ _______________ ________________ ________________ _______________ ________________ ________________ ________________ _________ 1120南假假假3 3假0 0假0 0 2南false 1736 false 0 false 8 88 false 0 0 false 28 3 6 3 true 1138 false 0 false 4 314 false 1 28 false 0 2 8 2 true 662 false 0 false 2 29 false 1 169 false 28 0
显示真相度量表。
truthMetricsTable (tam)
ans =表2×10TruthID AssociatedTrackID DeletionStatus TotalLength BreakStatus BreakCount BreakLength InCoverageArea EstablishmentStatus EstablishmentLength _______ _________________ ______________ ___________ ___________ __________ ___________ ______________ ___________________ ___________________ 2 8假2678假4 168真的真的56 3 6假2678假3 645真的真正的84
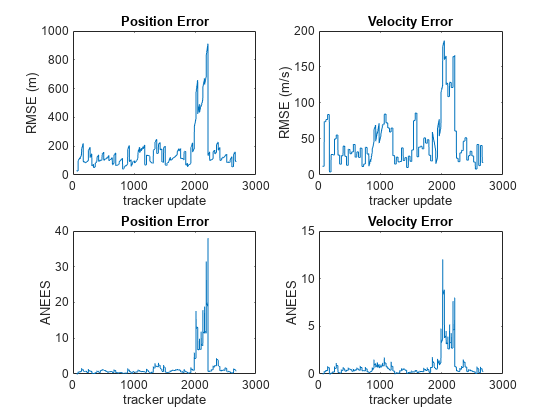
绘制RMSE和ANEES误差度量。
subplot(2,2,1) plot(posRMSE)标题(的位置误差)包含(跟踪更新的) ylabel (“RMSE (m)”) subplot(2,2,2) plot(velRMSE)标题(“速度误差”)包含(跟踪更新的) ylabel (“RMSE (m / s)”子情节(2,2,3)情节(posANEES)标题(的位置误差)包含(跟踪更新的) ylabel (“一”)子地块(2,2,4)地块(velANEES)标题(“速度误差”)包含(跟踪更新的) ylabel (“一”)
显示每个记录轨道的当前错误度量。
currentTrackMetrics (tem)
ans =2×5表TrackID posRMS velRMS posANEES velANEES _______ ______ ______ ________ ________ 6 8 129.26 12.739 1.6745 0.31325 44.712 20.988 0.05974 0.2453
显示每个单独记录的真值对象的当前错误度量。
currentTruthMetrics (tem)
ans =2×5表TruthID posRMS velRMS posANEES velANEES _______ ______ ______ ________ ________ 2 3 44.712 20.988 0.05974 0.31325 129.26 12.739 1.6745 0.2453
显示每个记录轨道的累积误差指标。
cumulativeTrackMetrics (tem)
ans =4×5表TrackID posRMS velRMS posANEES velANEES _______ ______ ______ ________ ________ 1 117.69 43.951 0.58338 0.44127 2 129.7 42.8 0.81094 0.42509 6 371.35 87.083 4.5208 1.6952 8 130.45 53.914 1.0448 0.44813
显示每个单独记录的真值对象的累积误差度量。
cumulativeTruthMetrics (tem)
ans =2×5表TruthID posRMS velRMS posANEES velANEES _______ ______ ______ ________ ________ 2 3 134.41 48.253 0.96314 0.49183 258.21 65.078 2.2514 0.93359
版本历史
在R2018b中引入
您也可以从以下列表中选择一个网站: