主要内容
中位数
中位过滤3-D点云数据
描述
ptcloudout.= PCMedian(ptcloudin)中位数函数在边缘上没有填充零。相反,它仅在可用的邻域值运行。
如果输入点云是有组织的点云,则中位数函数使用N-借-N邻域法。如果点云是无组织的,则函数使用径向邻域方法。
ptcloudout.= PCMedian(___那名称,价值)'过滤',3将有组织的点云设置为3的中值滤波器的大小。
例子
中位滤波嘈杂的点云
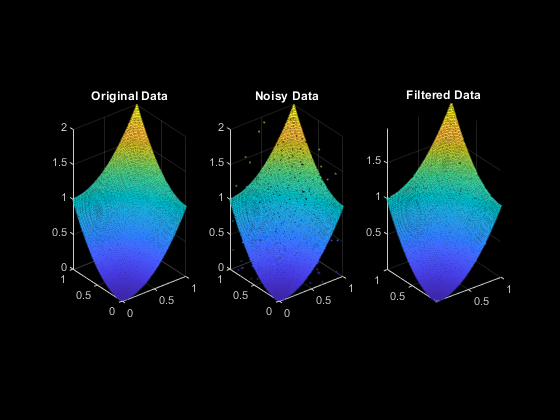
使用中位过滤器从点云中移除噪声。首先,向点云添加随机噪声。然后,使用中位数函数来过滤噪声。
创建一个点云。
gv=0:0.01:1[十、 Y]=网格网格(gv,gv);Z=X.^2+Y.^2;ptCloud=点云(类别(3,X,Y,Z));
添加随机噪声沿着Z.-轴。
temp = ptcloud.location;count = numel(temp(:,:,3));温度((2 * count)+ randperm(count,100))= rand(1,100);TEMP(COUNT + RANDPERM(COUNT,100))= RAND(1,100);温度(Randperm(Count,100))= Rand(1,100);ptclouda = pointcloud(temp);
应用中值滤波器并显示三点云(原始、有噪和过滤)。
ptcloudb = pcmedian(ptclouda);子图(1,3,1)pcshow(ptcloud)标题('原始数据')子图(1,3,2)PCSHOW(PTCLouda)标题('嘈杂的数据')子图(1,3,3)pcshow(PtcloudB)标题(“过滤数据”)
对无组织点云数据应用中值滤波
将点云数据加载到工作区中。
ptCloud=pcread('highwayscene.pcd'); 投资回报率=[0200-515];指数=findPointsInROI(ptCloud,roi);ptCloud=选择(ptCloud,索引);ptCloud=pcdownsample(ptCloud,'gridaverage',0.2);
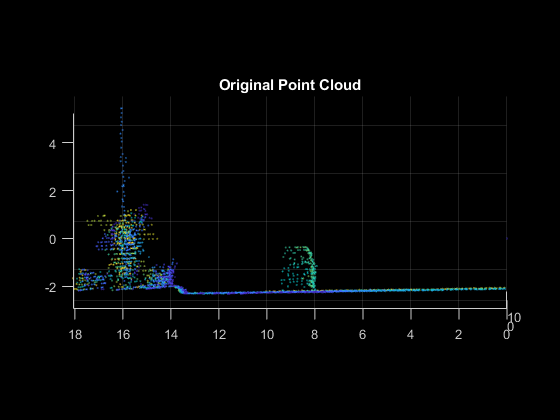
显示点云数据。每个点基于其X坐标进行颜色编码。
图pcshow(ptcloud.location,ptcloud.location(:,1))查看(-90,2)标题('原始点云')
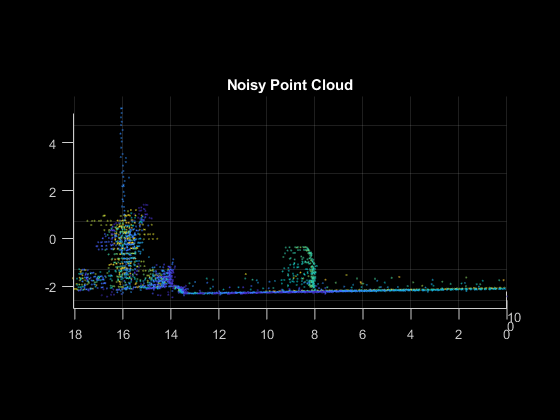
在间隔内沿z通道添加噪声(一种那B.). 价值观一种和B.选择使噪音看起来靠近地面。
temp = ptcloud.location;count = numel(temp(:,3));a = -2.5;b = -2;温度((2 * count)+ randperm(计数,200))= a +(b-a)。* rand(1,200);ptclouda = pointcloud(temp);
显示噪波点云。每个点根据其x坐标进行颜色编码。
图pcshow(ptclouda.location,ptclouda.location(:,1))查看(-90,2)标题('嘈杂的点云')
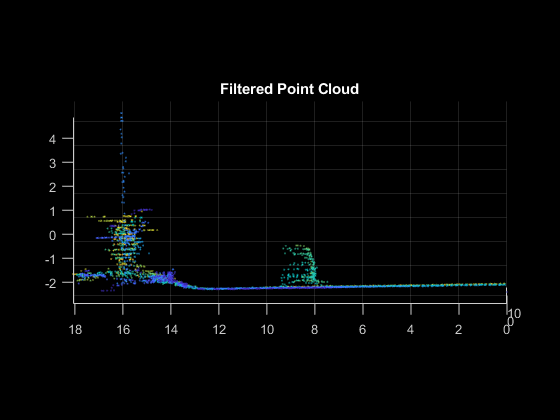
在点云上涂上中位滤波器。
ptCloudB=pcmedian(ptCloudA,'方面'3.“半径”,1);
显示过滤后的点云。每个点根据其x坐标进行颜色编码。
图pcshow(ptcloudb.location,ptcloudb.location(:,1))查看(-90,2)标题(“过滤点云”)
输入参数
输出参数
扩展能力
在R2020B中介绍
您还可以从以下列表中选择网站: