部件
通过关节,齿轮,和约束连接机构
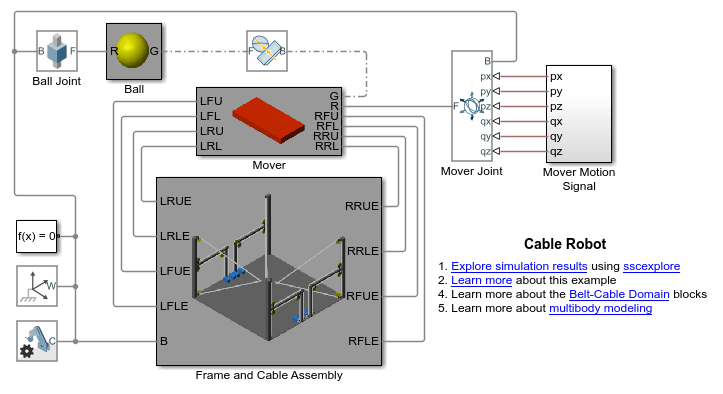
关节和约束块连接体将它们组装成铰接装置。接头块确定允许平移的连接体之间的最大程度的自由的旋转和。约束块通过应用运动的关系,往往几个自由度降低这一数字。有对模型的拓扑结构没有任何限制:你可以运动的树木,如双摆和动态循环,如四杆建模。
的Simscape块
主题
制约多体组件
了解如何使用,以满足齿轮约束装配要求刚性变换块。
使用的Simscape™统计查看器来确定一种机制,运动自由度。
用一个点上曲线约束块到飞机襟翼的运动限制在规定的弯曲轨迹仿样块。
使用常见的齿轮约束块耦合,其包括行星齿轮系统的各机构的旋转运动。
了解如何使用简单的齿轮模型作为例子来模拟齿轮的制约。
精选示例












您还可以选择从下面的列表中的网站: