主要内容
模拟和分析
运行仿真,可视化模型,并运行运动学分析
更新框图以组装模型并可视化其初始配置。可视化打开力学浏览器。模拟模型中发挥交互动画。一定要挑适合物理模型求解器,如Ode15s,并指定最大时间步长足够小,以捕捉模拟期间预计最快有意义的改变。
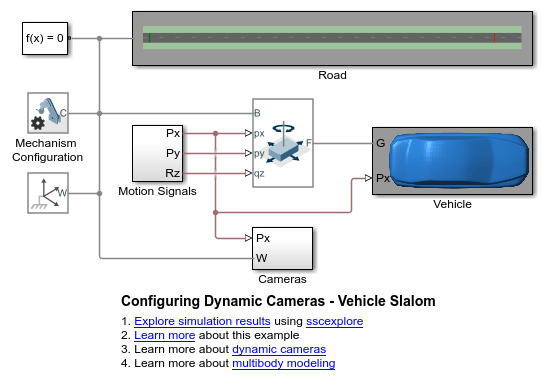
打开相机管理器添加移动,动态相机,可以捕获动画。动态摄像机可以是两种类型:密钥帧或跟踪。关键帧摄像机在机械探险家中交互之间的视点之间移动。跟踪摄像机附加到模型中的帧。用视频造物主或者smwritevideo.以视频格式录制动画的功能。
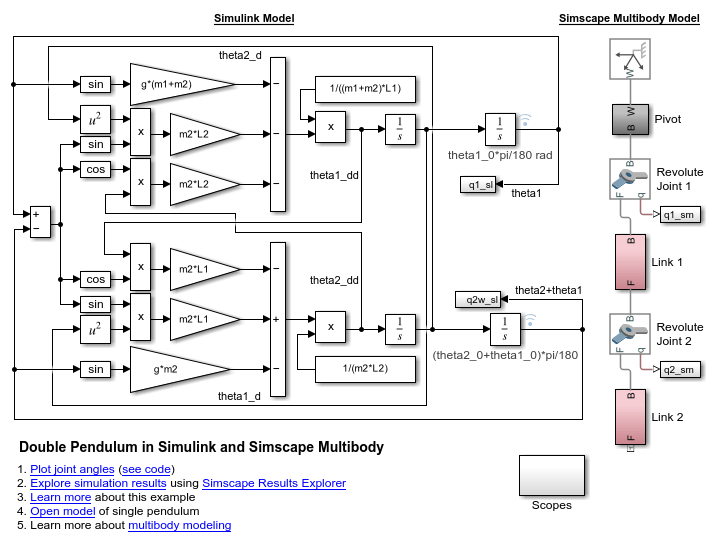
使用KinematicsSolver类以创建模型的运动表表示,并制定一个用于解决的运动问题。KinematicsSolver对象包含所有的模型中可用的关节变量。与框架变量补充它们,同时将与关节和帧变量作为目标,猜测,以及用于分析的输出。
职能
话题
基本可视化
设置模型的配置参数,以保证力学资源管理器模型更新或模拟自动打开。
选择标准视图,设置向上轴约定,并使用鼠标快捷方式旋转,滚动,平移或缩放型号。
工作流程步骤更新和模拟的Simscape™多体™模型。
可视化不仅是一个多体动力学仿真的核心部分,而且在造型机构和核实他们的形状,大小,帧展示位置和颜色的必备工具。下面是在多体的Simscape环境中可用的可视化实用工具和他们在你的建模工作流程中扮演的角色的概述。
使用机械探险器框架亮点和形象的块可视化帧。
高级可视化
利用力学原理资源管理器转到对应于树视图窗格中的节点块。
可视化滤波以选择性地示出了装置和隐藏的固体,机构,并且在力学资源管理器的多体子系统。
使用选择性模型可视化仅显示与您相关的模型组件。
特色例子

您还可以从以下列表中选择一个网站: