r
以固定频率执行循环
描述
这r对象使用RATECONTROL.(机器人系统工具箱)超级类以继承其大部分属性和方法。主要区别是RATECONTROL.使用ROS节点作为时间信息的源。因此,它可以使用ROS仿真或壁钟时间(见有效时间财产)。
如果罗斯尼特在Matlab创建一个ROS大师®,全局节点使用挂钟时间。
表现的r对象和维护的能力挺好的值取决于ROS中的时钟信息的发布。
小费
操作系统的调度解决和其他系统活动的级别可能会影响速率执行精度。结果,用于执行MATLAB代码的准确速率定时限制为100Hz。为了提高性能和执行速度,使用代码生成。
创建
特性
挺好的-期望的执行率
标量子
所需的循环执行速率,指定为赫兹的标量。使用时等待,循环运行每个挺好的秒,除非循环需要更长时间。然后它基于指定的循环开始超支。
肯定的-执行之间的期望时间段
标量子
执行之间的所需时间段,指定为标量以秒为单位。此属性等于逆挺好的。
总计-施工或重置以来经过时间
标量子
自建造或重置以来经过的时间,指定为标量以秒为单位。
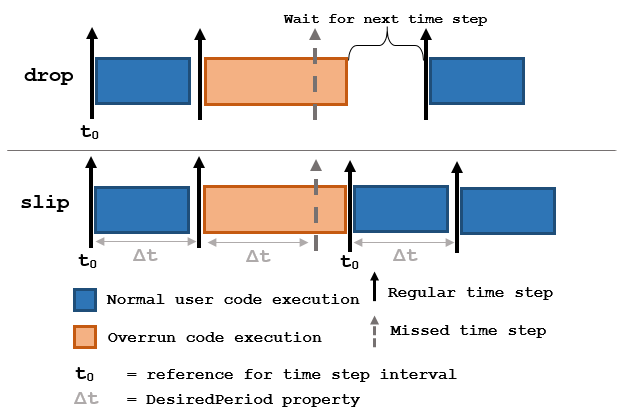
超支-处理超支的方法
'滑'(默认)|'降低'
有效时间-指示灯如果使用仿真或挂钟时间
真的|错误的
指示器如果使用仿真或挂钟时间,则返回真的或者错误的。如果真的, 这速度对象是使用ROS仿真时间来调节循环执行速率。
例子
在R2019B中介绍
您还可以从以下列表中选择一个网站: