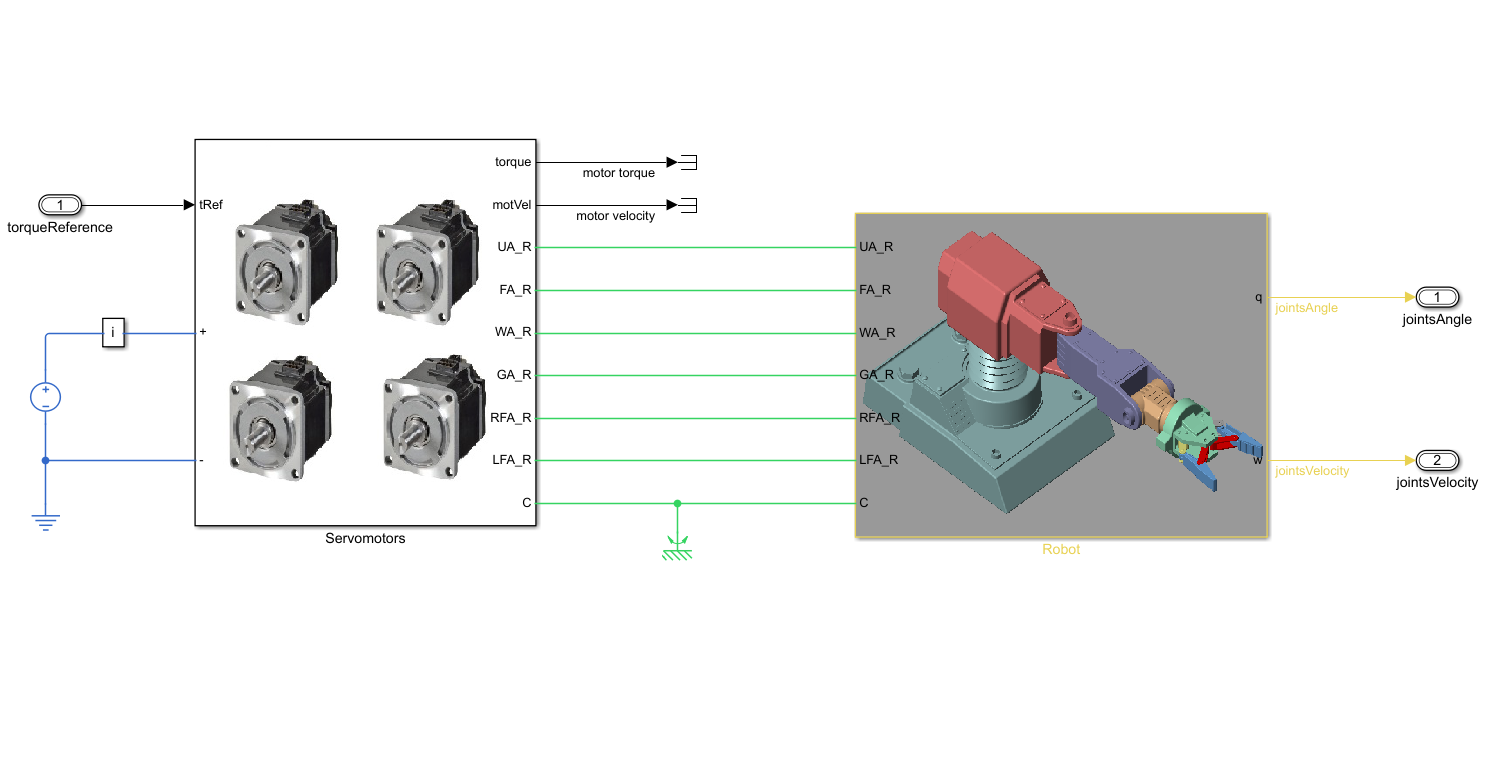
机械臂电动驱动,通过pid级联(速度环和位置环)控制。
六台电动机用于驱动机器人的每个关节。
引用作为
弗兰·阿尔德里西奥(2022年)。机器人手臂(//www.tianjin-qmedu.com/matlabcentral/fileexchange/71509-robot-arm), MATLAB中央文件交换。检索.
实用程序脚本
工作/ slprj / raccel / closedLoop_toTune
工作/ slprj / raccel / closedLoop_visual
库
测试
您也可以从以下列表中选择网站: