文件交换
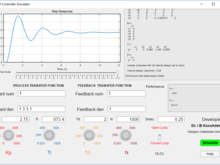
PID控制器模拟器的LTI系统w / w / o输入延迟
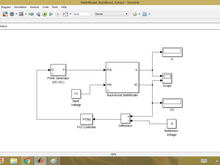
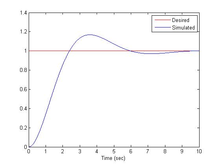
该文件显示了PID控制器优化在MATLAB和Simullink直流电机控制。
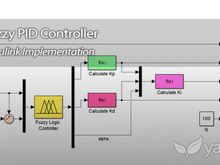
设计和实现模糊PID控制器的增益调度的仿真软件万博1manbetx
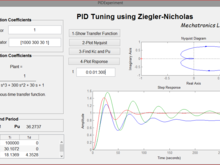
GUI容易发现P、PI和PID收益使用齐格勒尼古拉斯
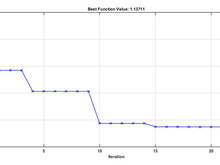
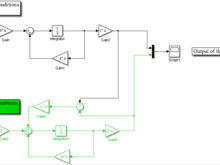
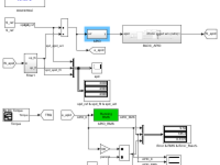
通过使用PSO tunining PID控制器
模型中使用的“理解卡尔曼滤波器,第6部分:如何使用卡尔曼滤波仿真软件”视频万博1manbetx
最优模糊逻辑控制器使用Particel群优化
基本的卡尔曼滤波器,大量评论认为,对于初学者来说卡尔曼滤波。
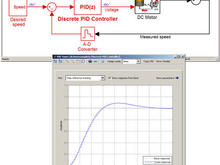
这个演示文件显示了PID控制器设计和调优功能在MATLAB和Simullink。
速度控制感应电动机的使用空间
提供了一个方程的非线性分数阶PID控制器参数。
无刷直流电机控制使用PI控制器
模型中使用的“理解卡尔曼滤波器,第7部分:如何使用扩展卡尔曼滤波仿真软件”视频万博1manbetx
一个例子,一个观察者设计一个可观测状态空间系统。
显示了一个模拟温度的控制与PID控制器的使用。
解决确定性finite-horizon iLQG / DDP的最优控制问题
这个文件共享的想法如何设计和开发一个自适应PID控制的速度刷汽车尽管扭矩变化
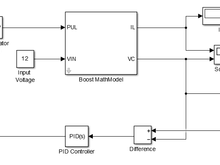
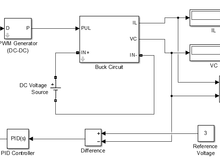
使用PID控制器闭环buck变换器模型。
一个非常简单和有效的方法来构建一个在单个m.code PID控制器
电力系统状态估计使用加权最小二乘法
分数阶比例积分微分控制器调谐器
三个不同的卡尔曼滤波器的实现模型(R)。万博1manbetx
简单的程序(可以普遍用于各种应用程序)
直升机美联储直流电机驱动,直流电机的速度控制
Multivarialbe控制工具箱
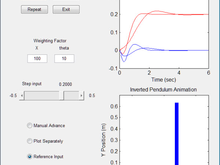
MATLAB文件的集合,用于分析倒立摆&设计控制器。
许多例子模型如何控制直流电机的速度和位置)
学习如何在Matlab中实现卡尔曼滤波器。
巴克万博1manbetx的Simulink仿真模型可配置,提高和buck-boost直流-直流转换器与PWM PI控制
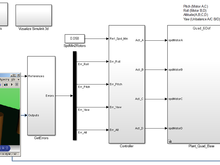
四轴飞行器模拟器
MATLAB, sisotool
速度和位置控制DC /刷驱动器使用PSO同时调谐。
交互式模拟PID自动调谐。
分析计算有限螺线管的磁场(这也是圆柱形磁体领域)和立方形的磁铁
并联有源滤波器
动画的倒立摆控制系统等方面
卡尔曼滤波和扩展卡尔曼滤波器的例子对INS / GNSS导航、目标跟踪,terrain-referenced导航。
这些文件与文本与MATLAB控制和估计,第五版
这个演示文件显示了PID控制器设计新功能在MATLAB和Simullink和调优。
这是一个简单的GUI和本届工具控制初学者。
MATLAB代码3自由度PID控制器的PUMA560机器人
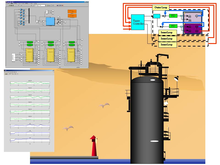
模拟控制的气体分离器由膜分离过程。
使用PID控制器闭环提高变换器模型。
这个模型是我的Quadrotor项目的一部分
这个示例这个示例显示了简单的倒立摆控制等方面
一个工具和教程执行最优PID调优
编码得到的负面反馈增益矩阵线性二次调节器
一种改进的PID控制与附加非线性项蜜蜂成功测试。
使用现场编辑任务调整PID控制器的工厂
使用和优化PID(比例、积分、微分)控制器为您的项目
文件中使用的网络研讨会数据驱动控制进行了2012年7月12日
Matlab 万博1manbetx/ Simulink功能基于扰动观测器的控制代码
OptimPID是一个基于MATLAB接口,它可以用来优化PID参数
优化PID控制器误差最小
这种模拟是正确地工作直到2017年MATLAB和MATLAB的更高版本
简单的射频干扰机模型,模拟电子战。
等方面已实现的直流电机不同的修改已被证明与PID复杂性及其比较
反馈PID控制与仿真软件Arduino由于硬件。万博1manbetx
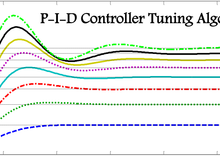
MATLAB的方法研究不同类型的Ziegler-Nichols P-I-D控制器优化算法
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站
表现最好的网站怎么走吗
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
美洲
欧洲
亚太地区
联系你当地的办公室