
生成代码优化手臂Cortex-R处理器
嵌入式编码器®万博1manbetx支持包手臂®皮质®- r处理器允许您生成、执行和验证代码从MATLAB®和仿真软万博1manbetx件®在手臂Cortex-R基于处理器。万博1manbetx支持选择实时

手臂皮质为嵌入式编码器快速- m模型支万博1manbetx持包。
嵌入式编码器®万博1manbetx支持包手臂®皮质®快速- m模型使虚拟平台的使用作为公益诉讼和外部硬件目标模式模拟。这个包目前支持万博1manbetx

代码生成优化的DSP算法手臂皮质一。
DSP系统工具箱™支持方案万博1manbetx手臂®皮质®——处理器与氖™技术提供了优化Ne10库生成代码时嵌入式编码器®为手臂皮质

生成代码优化皮质- m处理器。
DSP滤波器的支持,使万博1manbetx用手臂皮质从DSP系统- m CMSIS库支万博1manbetx持工具箱™。这个支持包万博1manbetx功能R2013 b。如果你有下载或安装问题,请联系
生成代码优化手臂皮质——一个处理器。
。对DSP滤波器的支持,使用万博1manbetx手臂皮质Ne10库支持DSP系统工具箱万博1manbetx™。support package is functional forR2014年及以后。如果你有下载或安装问题,请

附加为嵌入式编码方案的支持万博1manbetx手臂皮质——/皮质- m处理器
为手臂皮质- m或手臂皮质——使用嵌入式编码器硬件处理器平台®万博1manbetx支持包手臂®皮质®- m处理器或嵌入式编码器®万博1manbetx支持包手臂®皮质®——处理器上
代码生成优化的DSP算法皮质- m。
做手臂皮质使用- m处理器的系统皮质单片机软件接口标准(CMSIS) DSP图书馆。这个支持包万博1manbetx功能R2013 b。

生成的代码手臂皮质基于单片机烦恼。
万博1manbetx®编码器™支持方万博1manbetx案手臂®皮质®的烦恼®单片机使您能够创建并运行仿真软件万博1manbetx®扰乱微控制器模型。支持包包万博1manbetx括一个图书馆

手臂编译器支持嵌入式编万博1manbetx码包
编译器,支持方案文档。万博1manbetx要启用手臂快速模型作为一个虚拟的目标在嵌入式程序员简化模拟,看到手臂皮质- m模型支持包快万博1manbetx

机器人手臂两个传送带传输部分
2017 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.2.1.2.zipForR2017年:https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.1.1.1.zipForR2016 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/16.2.1.0.zipThe机器人手臂模型

机器人手臂两个传送带传输部分
2017 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.2.1.2.zipForR2017年:https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.1.1.1.zipForR2016 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/16.2.1.0.zipThe机器人手臂模型

设计特别提款权系统使用USRP (R)收音机。
使用MATLAB的I / O®函数或模型万博1manbetx®块。这个支持包万博1manbetx功能R2013年及以后。

函数调用统计软件包R在MATLAB。
基于COM接口,允许您调用R在MATLAB函数。功能:打开R——连接到一个R服务器process.evalR——运行一个R命令。getRdata -副本R变量

安装MinGW-w64 C / c++编译器为Windows

生成的代码手臂皮质——英特尔SoC平台的核心。
嵌入式编码器®万博1manbetx支持英特尔的包®SoC平台支持ANSI万博1manbetx®C代码生成的手臂®英特尔SoC的一部分。使用时结合高密度脂蛋白编码器™支持方案万博1manbetx

万博1manbetx仿真软件BeagleBoard块库创建独立的应用程序
BeagleBoard (https://beagleboard.org/)是一个低成本、单板计算机用于音频、视频和数字信号processing.WithR2012,仿真万博1manbetx软件提供了内置的支持万博1manbetx
MATLAB-to-C工作流实例在IAR嵌入式工作台®。
DSP系统工具箱™支持方案万博1manbetx手臂®皮质®- m处理器,当与EmbeddedCoder配对®,使您能够从MATLAB生成优化的C代码®系统对象™或仿真软件万博1manbetx®blocks.This
原型开发和部署一个神经网络的图像分类使用MNIST数据上手臂皮质米微控制器
将MATLAB和C变量/ IEEE 754r精度浮点位模式的一半。
halfprecision转换的输入参数/半精度浮点位模式对应于IEEE 754r。位模式存储在一个uint16类变量。请注意,
手臂机器人控制系统
求解逆运动学模型手臂机器人

过渡到工具R2014 b图形
MATLAB图形更新程序更新您的代码使用MATLAB图形的变化R2014 b。MATLAB图形更新应用程序代码检查MATLAB文件需要更新
部署在有限精度的训练网络手臂Arduino Uno等微控制器
神经网络回归问题,如何生成可读单精度浮点和定点代码和如何部署到一个手臂皮质单片机如Arduino Uno。我们使用
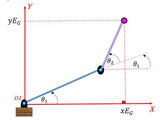
计算和可视化2-link机器人的逆运动学手臂随着雅可比矩阵,使机器人写你好。
这个例子显示了如何定义一个双连杆平面机器人手臂符号变量,计算运动学和逆解。这个例子也与轮廓图可视化结果

NXT SCARA基于模型的设计基于嵌入式编码器NXT机器人。
NXT SCARA是双连杆平面机器人手臂LEGO Mindstorms NXT建造。SCARA代表选择性的装配机器人手臂。请参考以下网址了解更详细的信息

一个机器人手臂复制的手臂人类操作员的手势。
本项目旨在开发一个机器人手臂,可以复制手臂人类操作员的运动。人类的运营商手臂手势是获得使用骨骼从Kinect的深度图像



这是一个为一个3自由度机器人Simscape模型手臂
在此提交我们模型的一小升高3自由度(自由度)机器人手臂在MATLAB Simscape从www.roboholicmaniacs.com购买。在此使用的致动器手臂是步进电机
计算RA-01机器人的正运动学手臂由图像SI公司。
这个函数发现RA-01机器人的正运动学手臂由图像SI公司,纽约。RA-01有五个自由度。这个函数输出两个向量。第一个向量是

这个工具允许用户执行公益诉讼测试嵌入式处理器和模拟器通过多IDE青山软件。
皮质一,Cortex-R,皮质- m、瑞萨RH850 RISC-V, PC, TriCore——支持Linux和Window万博1manbetxs主机操作systemsProcessor SupportOn多的指令集仿真器皮质- - - - - - -手臂v8(64位
n倍频带特性,手手臂,A和C加权滤波器
第n个八度的手手臂和交流滤波器工具箱是基于八度工具箱,克利斯朵夫Couvreur在Matlab文件交换身份证号码69。这个工具箱使得过滤器更稳定

这是一个简单的例子为一个拟人化的模拟器手臂有3个自由度。
这是一个简单的GUI来计算随机末端执行器的位置,计算逆运动学和情节关节的轨迹图。你可以发送的位置手臂

这是一个仿真软件模型万博1manbetx来控制机器人手臂使用Kinect传感器捕获的手势。
这是一个仿真软件模型万博1manbetx来控制机器人手臂使用Kinect传感器捕获的手势。一个机器人手臂开发使用伺服电机,复制了对吧手臂肩、肘和手

单击并拖动观看手臂回应。包括了良好的注释派生的代码。
视频:https://www.youtube.com/watch?v = cmW7pRLut8A2-link平面手臂兼容控制器和重力补偿。用户可以单击并拖动来移动末端执行器的目标位置


为意法半导体STM32处理器生成代码优化的基础
安装包和如何部署你的第一个模型。这个支持包万博1manbetx功能R2013 b。2021年STM32CubeMX工作流添加b。有关详细信息,请参阅发行说明。注意:这个支持万博1manbetx

使用MATLAB编码器生成C和c++代码深入学习网络
库:英特尔oneAPI深层神经网络库(oneDNN,以前MKL-DNN):英特尔cpu, AVX2的支持万博1manbetx手臂计算库:手臂皮质——处理器支持氖instruction万博1manbetxsWhen用于仿真软件万博1manbetx
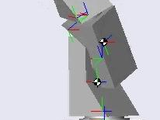
4自由度手臂进口通过SimMechanics为最优pick-place控制生成动力学通过恶作剧来解决
4自由度手臂基于Motoman IA20建于AutoDesk的发明家。SimMechanics用于生成一个仿真软件模型。万博1manbetx这个模型生成机器人的动力学含蓄,所以没有

MATLAB-to-C工作流实例在凯尔μVision IDE
作为一个例子MATLAB-to-C工作流的优化代码生成手臂皮质白皮书- m处理器说明了如何从MATLAB(端口生成的C代码R2014 b)凯尔μVision IDE

机器人模拟和动画三个链接手臂提高玻璃表高度。
控制一个机器人手臂通过使用Kinect 2.0


matlab blue-white-red colorbar,零总是对应于白色。参见darkb2r
,分别。白色总是对应的值为零。你应该输入两个值与matlab caxis一样,就是颜色值的最小和最大价值。例如colormap (b2r

文件从MATLAB的“面向对象编程导论(R)”研讨会。
这包含了演示文件和报告PDF文件中使用MATLAB的“面向对象编程导论(R)”研讨会,2009年4月交付。这些都是为了
模拟输入/输出(前台定时/ non-clocked)支持Digilent模拟发现。万博1manbetx
这个补丁将允许用户的数据采集工具箱3.1 (R2012 a)和3.2 (R2012 b)使用Digilent模拟发现董事会来捕获/生成电压数据,监测和non-clocked

控制仪器使用罗德与施瓦茨签证(R&SVISA)
仪器控制工具箱™支持方案万博1manbetxR,年代®签证接口允许您控制仪器,使测量数据,分析数据,并构建测试系统。曾经在MATLAB数据®,你可以

BeagleBoard上运行模型。
为R2013年及以后。

这个函数调用R运行R脚本(。rMatlab下文件)
这个函数调用R运行R脚本(。rMatlab下文件),并返回的运行R. log”与输入相同的文件夹中R脚本文件。这段代码只在Windows环境中工作。它可能在苹果工作
这些函数允许用户读取VAXD并在MATLAB VAXG文件R2008 b和之后。
在R2008 b, fopen不再支持vaxd和v万博1manbetxaxg文件格式。这个工具允许你使用ieee-le文件格式读取这些文件R2008 b和之后。这些工具不适合写vaxd或vaxg

一个万博1manbetx仿真软件(R)块的执行控制仿真软件模型万博1manbetx
这一块可以模拟仿真软件(万博1manbetxR在“实时”)模型。你也可以设置一个因素的实时exampel实时的实时的三倍。可以设置优先级
的7自由度模型手臂机器人在MATLAB仿真软件与滑万博1manbetx动模式控制器控制。
的7自由度模型手臂机器人在MATLAB仿真软件与滑万博1manbetx动模式控制器控制。模型将包括动态模型,驱动系统,控制器的实时3 d表示

万博1manbetx仿真软件BeagleBoard块库创建独立的应用程序
BeagleBoard (beagleboard.org)是一个低成本、单板计算机用于音频、视频和数字信号processing.InR2012 b,万博1manbetx仿真软件提供了内置的支持原型,测试万博1manbetx

生成代码优化BeagleBone黑色。
配置和访问BeagleBone黑色外围设备和通讯接口。对霓虹灯™为DSP滤波器优化的代码,使用手臂®皮质®Ne10库支持DSP系统工具箱万博1manbetx™。

演示了一个简单的翻译RMATLAB脚本,回R,使用OpenAI ChatGPT。
MATLAB支万博1manbetx持互操作性R但是你可能想要翻译RMATLAB或逆转。这个脚本演示了一个实验,这样翻译ChatGPT 3.5使用接口

避免与xPC目标CPU过载英特尔(TM) (R通过禁用重度)芯片组
机器人的运动学仿真手臂
这是一个小实例,说明了利用Matlab进行机器人的运动仿真手臂。这个例子还利用Matlab的图形capabilities.The

快速创建可发布阴谋:自动颜色和次要情节,统计,小提琴/箱形图等。
格拉姆是一个功能强大的绘图工具箱可以快速创建复杂,可发布在Matlab和启发Rggplot2库。这个灵感作为参考,格拉姆