 克利夫的角落:克里夫·莫勒尔对数学和计算机
克利夫的角落:克里夫·莫勒尔对数学和计算机 在MATLAB的艺术洛伦
在MATLAB的艺术洛伦 史蒂夫在图像处理与MATLAB
史蒂夫在图像处理与MATLAB 人在仿真软件万博1manbetx
人在仿真软件万博1manbetx 深度学习
深度学习 开发人员区
开发人员区 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 新闻标题背后
新闻标题背后 本周文件交换精选
本周文件交换精选 汉斯在某种程度上
汉斯在某种程度上 学生休息室
学生休息室 创业,加速器和企业家
创业,加速器和企业家 MATLAB社区
MATLAB社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー四元
四元数是复数的一般化,在计算机图形学和许多其他领域都有应用。
内容
埃德天使
埃德天使是加州理工学院和新墨西哥几天我的老朋友。埃德是作者一个受欢迎的系列教材计算机图形是现在已经达到了第8版。这些书有来自硅谷图形的WebGL来和JavaScript了OpenGL编程语言的进化。ED是工作在MATLAB的版本,我kibitzing。
两个维度
二维的生活很容易。平面上的一个点很容易用它的笛卡尔坐标$(x,y)$,或者极坐标$(r,\theta)$,或者一个复数$z$来描述。点绕原点的旋转很容易用笛卡尔坐标乘以一个2 × 2的正交矩阵来描述,或者用极角的增量来描述,或者用$z$乘以另一个复数来描述。
三个维度
三维的情况更复杂。有笛卡尔坐标$(x,y,z)$,或者球坐标$(r,\theta,\psi)$。但是单复数的三维模拟是什么呢?旋转更加复杂。它们需要说明旋转轴和角度。有很多3 × 3的正交矩阵可以产生旋转来选择。
哈密顿
哈密顿(1805-1865)是爱尔兰数学家,在都柏林三一学院教授,爱尔兰皇家天文学家。他的名字是与整个数学和物理学的重要概念有关。像他那个时代的许多其他数学家,他曾尝试通过添加第二个复杂的单元来概括二维复数。1846年,他意识到自己确实需要添加三个复杂的单位,$ I $,附加$ J $ $和$ķ。
点与叉积s manbetx 845
哈密尔顿四元数算法的关键成分是点积和叉积。s manbetx 845点积,也被称为内积,是线性代数在任何维数中的一个常见特征。两个向量的点积是一个标量。
$$ A \ CDOT B = A_1 B_1 \ + \ A_2 B_2 \ + \ A_3 B_3 $$
叉积只被定义在三维空间中。两个向量的叉积是第三矢量,取向为垂直于由前两个跨越的平面。如果$ I,$ $Ĵ和$ $ķ是在三维空间中,则对于轴单位矢量向量的叉积$ A $和$ B $是
$$ A \次数b =(A_2 B_3 - A_3 B_2)\ I \ + \(A_3 B_1 - A_1 B_3)\Ĵ\ + \(A_1 B_2 - A_2 B_1)\ķ$$
这是叉乘的快照。
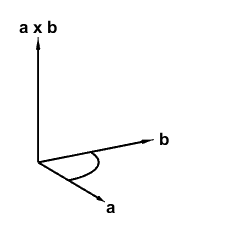
垂直于由$a$和$b$张成的平面的向量有两个可能的方向。传统的选择是由这张瑞士纸币上的右手法则和Facebook公司办公室标志上的表情符号做出的。


四元
四元数$ Q $有两个部分,一个标量$ S $和$矢量V $。标量是一个实数;认为$ S $作为标量单元的系数,$ 1 $的。矢量由三个实数;他们的三个假想单位的系数,$ I $,附加$ J $ $和$ķ。所以
$$ Q = [S,V] = S 1 \ + \ V_1 I \ + V_2Ĵ\ + \ V_3ķ$$
四元数乘法被定义使得每个假想单元的是$ $ -1平方根。
$ i^2 = -1, j^2 = -1, k^2 = -1
此外,三个单元通过他们的产品的循环特性的相互关系。s manbetx 845
$$ IJ = k时,\ \ JK = I,\ \き= j的$$
这些属性意味着
$$ジ= -k,\ \ KJ = -i,\ \ IK = -j $$
我们把$i$, $j$和$k$的这些性质称为“汉密尔顿法则”。
四元数除
假设我们有两个四元。
$ $ p = [r u] = r 1 \ + \ u_1 \ + u_2 j \ \ u_3 k $ $
$$ Q = [S,V] = S 1 \ + \ V_1 I \ + V_2Ĵ\ + \ V_3ķ$$
另外是明显的。
$ p + q = [r+s, u+v] $
四元数乘法
四元数乘法是巧妙和复杂。
$ $ p q = (r + u_1 i + u_2 j + u_3 k) (s + v_1 i + v_2 j + v_3 k) $ $
有在每个括号四个学期,所以在产品方面16。展开仔细因为$ I $,附加$ J $ $和$ķ没有上下班。应用汉密尔顿的规则,$ I ^ 2 = -1,$ I J = K,$ĴI = -k $等。术语16可以布置这样的。
$$ p Q = [\ r S - (U_1 V_1 + U_2 V_2 + U_3 V_3)\,$$
$$ \ \ \ \ \ \ \ \ R(V_1 I + V_2 J + V_3 K)+ S(U_1 I + U_2 J + U_3 K)\ +(U_2 V_3 - U_3 V_2)1 +(U_3 V_1 - U_1 V_3)J +(U_1 V_2 - U_2 V_1)K \] $$
我们认识到,两个熟悉的量,点和交叉产品。s manbetx 845
$$ U \ CDOT V = U_1 V_1 + U_2 V_2 + U_3 V_3 $$
$ $ u、v = (u_2 v_3——u_3 v_2) i + (u_3 v_1 u_1 v_3) j + (u_1 v_2 - u_2 v_1) k $ $
所以结果
$ p q = [r s - u \cdot v, r v + s u + u \times v] $$
这是四元产品的汉密尔顿的定义。
单位$i$, $j$和$k$的标量部分等于0,向量部分等于[1,0,0],[0,1,0]和[0,0,1]。例如,将它们插入产品定义中,
$$ I ^ 2 = [0 -i \ CDOT I,0 + 0 + I \倍I] = -1 $$,
$$ I J = [0 - 0,0 + 0 + I \倍J] = K $$
和
$ I = - k $,即$ I = - k $,即$ I = - k $
二星科学
二星科学是一个Patreon YouTube频道。https://www.patreon.com/acapellascience.
2016年,Capella Science制作了一个视频,视频中有两个汉密尔顿,一个是非常受欢迎的百老汇音乐剧《汉密尔顿》,另一个是爱尔兰数学家汉密尔顿。https://www.youtube.com/watch?v=SZXHoWwBcDc.下面是视频中的一帧截图。

QTN
MATLAB的2021A和2021B版本包括一个四元对象,该对象在几个导航工具箱之间共享。
我和埃德有我们自己更基本的目的,QTN.
帮助QTN
四元数的基本构造函数。qtn(a,b,c,d) qtn(a,[v1 v2 v3]) qtn(a)方法+ p + q - p -q uminus -q mtimes p*q ml除p\q mr除p/q mpower q^n inv(q) norm(q) disp(q)函数rot Euler randq qtn_examples注释:所有角度都是度数。该对象没有向量化。文档doc qtn在帮助浏览器中发布的输出
最重要的QTN方法是四元数乘积。我觉得这个代码是优雅的。
DBTYPE89:96QTN
89函数r = mtimes(P,Q)90%P * Q 91 P = QTN(P);92 Q = QTN(Q);93个R,S = P.S * q.s - 点(p.v,q.v);94 r.v = P.S * q.v + q.s * p.v +交叉(p.v,q.v);95 R = QTN(R);96月底
整个QTN类定义只有大约150行长。
基本
这里有几个例子,我们的基本四元数对象的测试。
单位中的两个。
I = QTN(0,[1 0 0])J = QTN(0,[0 1 0])
I = 0 + 1i + 0j + 0k j = 0 + 0i + 1j + 0k
他们的产品是第三单元。
K = 1 *Ĵ
K = 0 + 0I + 0j的+ 1K
所有这三个是-1。
Ijk = i*j*k = i^2 ii = i*i
IJK = -1 + 0I + 0j的+ 0K ISQ = -1 + 0I + 0j的+ 0K II = -1 + 0I + 0j的+ 0K
随机的
两个随机QTN的整系数
P = randq Q = randq
P = 2 + 8i中 - 1J + 4K Q = 0 + 4I - 6J + 7K
加法。
p_plus_q = P + Q
p_plus_q = 2 + 12 1 - + 7J 11K
乘法。
pq = p *
PQ = -66 + 25I - 52J - 30K
正确的部门。
R = PQ / P
R = 0 + 9.6i + 2j - 2.2k
左师。p \(P * Q / P)* P应该是的舍入误差范围内问:.
TEST1 =范数(P \ r * P - Q)
TEST1 = 4.4409e-16
旋转
类型腐烂
函数r = rot(theta,v) % rot r = rot(theta,v)是角旋转%的四元数(qtn),以角度表示,绕轴v旋转v = v/范数(v);R = qtn(cosd(theta), sind(theta)*v);结束
随机的旋转轴。
v = randn(1、3)
V = -0.1241 1.4897 1.4090
大约旋转36度v。
R =腐病(36,v)的
R = 0.809017 - 0.0355214i + 0.426247j + 0.403167k
重复36度旋转10次是360度旋转,这应该是四元数乘法单位的舍入误差内。
E = QTN(1)TEST2 =规范(R ^ 10 - E)
E = 1 + 0I + 0j的+ 0K TEST2 = 4.6059e-16
代码
(加,2021年9月11日)。你可以得到的代码QTN并从有关这些链接功能:qtn.m那rot.m那Euler.m那randq.m那qtn_examples_1.m.





评论
要发表评论,请点击这里登录您的MathWorks帐户或创建新的。