 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 洛伦谈MATLAB的艺术
洛伦谈MATLAB的艺术 MATLAB在图像处理中的应用
MATLAB在图像处理中的应用 人在仿真软件万博1manbetx
人在仿真软件万博1manbetx 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周最佳文件交换选择
本周最佳文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー利用PID调谐器进行植物识别
在R2014a,系统识别功能已添加到PID调节器应用创建工厂模型,允许您在一个应用程序中完成工厂识别和控制器调整。
我试了一下新的乐高MINDSTORMS EV3支持包万博1manbetx,它的易用性给我留下了深刻的印象。
让我们看看它是如何工作的。
获取数据
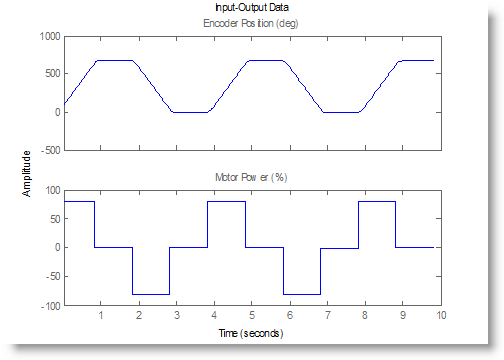
要确定一个植物模型,首先需要实验数据。在我的例子中,我创建了以下简单的模型,将动力应用于电机,并测量产生的运动。
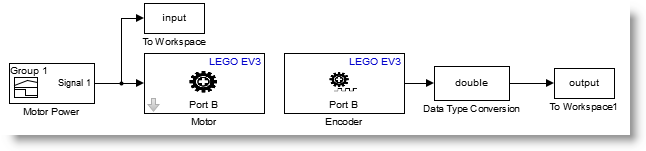
使用外部模式和工作空间块,获取实验数据,供以后使用。
控制模型
我想控制电机的位置,因此我创建了以下模型:
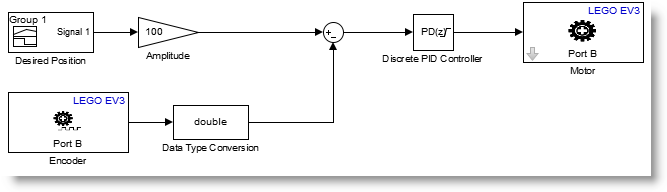
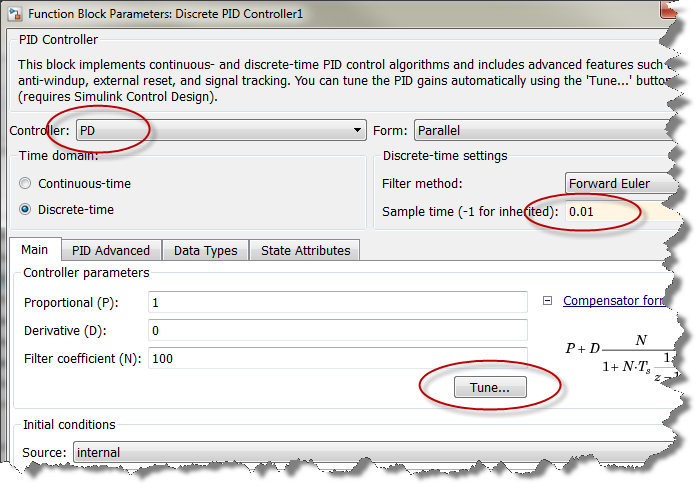
我打开对话离散PID块,我指定我想要的控制器类型,它的采样时间,并单击Tune按钮来启动PID Tuner应用程序。
确定植物
正如第一个猜想,PID调谐器试图通过线性化模型中存在的块来获得一个植物模型。显然,在这种情况下,这将不起作用,因为Simulink模型不包含植物。万博1manbetx
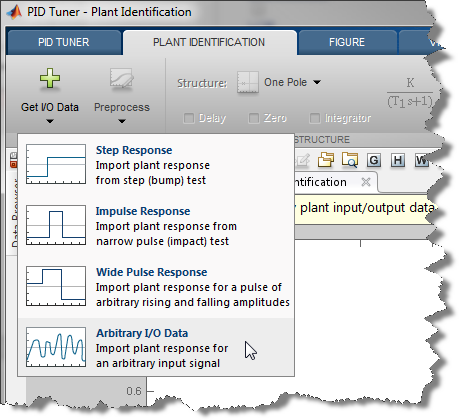
根据先前获得的数据来识别一种植物,选择确定新工厂选择:

将出现一个植物标识选项卡,您可以在该选项卡中导入以前保存的数据。
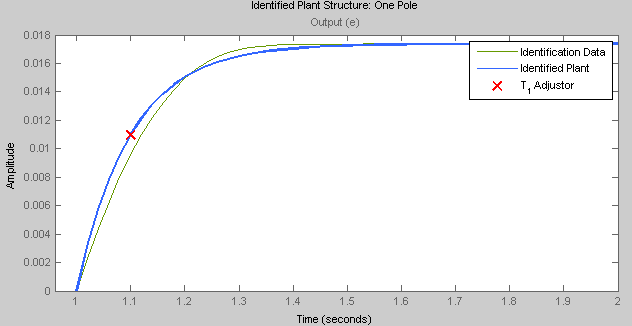
理论上,像这样的电机应该使用二阶传递函数和积分器来建模(请参阅本教程中的示例).然而,根据过去的经验,我知道第二极对这款乐高马达的影响几乎可以忽略不计。在“设备标识”选项卡中,我指定一个带有积分器的单极系统,然后单击自动估计按钮正如你所看到的,这做得很好。我放大了其中一个转换,以表明植物的产量与实验数据并不完全相同。。。这是不可能的。
优化控制器
一旦您对确定的工厂感到满意,请单击保存植物按钮并切换到PID调谐器选项卡。玩滑块,直到你得到一个满意的反应,一旦这是完成点击更新块将调整后的增益应用于模型中的控制器块。
 (点击放大)
(点击放大)部署控制器
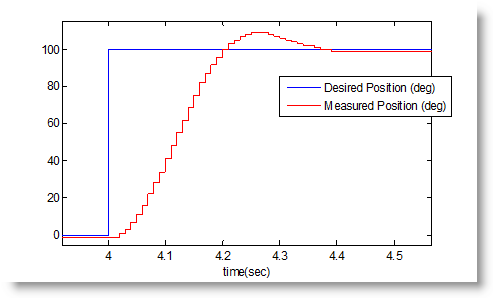
我尝试在EV3上运行控制模型,结果与PID调谐器中的结果几乎相同,这给我留下了深刻的印象:
现在轮到你了
这只显示了这个应用程序可以做的一小部分。这里有一些额外的资源供你学习更多:
- 有关此工作流的更详细解释,请查看基于实测输入输出数据的PID控制器整定视频
- 如果您正在为具有不连续性的Simulink模型(如MOSFET和PWM)设计PID控制器,请查看万博1manbetx不连续模型的PID控制器整定视频
- 如果您对使用MATLAB和Simulink的PID控制设计的更全面的概述感兴趣,请观看万博1manbetxPID控制变得简单网络研讨会。
您可以尝试使用具有集成系统识别功能的PID Tuner应用程序,并通过留下评论这里.







评论
如需留言,请点击在这里登录到您的MathWorks帐户或创建新帐户。