 克里夫角:克里夫·摩尔论数学与计算
克里夫角:克里夫·摩尔论数学与计算 洛伦谈MATLAB的艺术
洛伦谈MATLAB的艺术 MATLAB在图像处理中的应用
MATLAB在图像处理中的应用 Simulin万博1manbetxk上的家伙
Simulin万博1manbetxk上的家伙 深度学习
深度学习 开发区
开发区 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周最佳文件交换选择
本周最佳文件交换选择 物联网上的汉斯
物联网上的汉斯 学生休息室
学生休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
用MATLAB预测无级变速器的动态特性
今天的客博是亚历克斯·席尔瓦·达普里菲卡和卢卡斯·马丁斯·李嘉图从联合国我巴西利亚大学–塞拉多-巴哈SAE团队.他们将离开说明他们是如何利用MATLAB预测contin的动态行为的U无级变速器(CVT)。
介绍和动机
无级变速器(CVT)是一种汽车自动变速器概念,能够连续改变传动比,保持发动机旋转恒定,从而保持扭矩和功率输出。CVT的使用是非常重要的相当地常见的在里面巴哈赛团队,因为它能够取代这个传统离合器及其应用的可能性正在调整适用于不同的应用。
在这方面,我们从比拉塔斯做塞拉多巴哈赛团队在布拉斯利亚大学,多年来一直致力于调整飞锤和弹簧组,以确定最佳组为我们的汽车提供更好的纵向性能。然而,多年来,这种设置执行主要是在实验的基础上,这需要大量的测试时间和财政资源.

所以最后年,我们决定实施一项雄心勃勃的计划作为我们的目标毕业论文,从控制机构和皮带的建模出发,在MATLAB中开发一种预测CVT动态行为的算法。C于是,有可能改变系统的输入飞锤的质量和惯性、弹簧刚度并分析了二次皮带轮转速和扭矩的输出。因此CVT的设计和安装过程更便宜的和较少的详尽的
最初的目标是到自行设计无级变速器具有这模型,但在看到算法的复杂性和各种可能性后,我们意识到要成功,我们需要充分了解模型变量。然后,我们缩小到焦点只是论运动学动力分析.
我们将尝试以下主题到简要介绍我们在项目开发的当前阶段获得的方法和结果,以及未来的实施和项目。
方法论
我n阶to模型全球CVT行为,我们把工作分成两部分到两个不同的型号,一个用于皮带和皮带其他驱动机构.对于这个第一个模型,我们在节点中离散皮带加入然后是弹簧和减震器,节点位置时间决定了问题的解决每个节点中的力平衡。图1显示了皮带离散化和作用在皮带上的力节点[1],和方程式1:每个节点中的力之和。

图1:作用在节点上的力[1]

用每个节点的力之和除以质量,我们得到了运动的动力学方程. 将方程2积分两次,我们可以找到节点的位置值。

因此这个主滑轮输入旋转数据,皮带轮上的轴向力,以及提交给系统的电阻转矩,我们能够发现每一个的位置和速度离散化节点和因此确定th上的旋转和扭矩e辅助滑轮。
WE使用机械无级变速器在我们的巴哈,所以这个平衡泉和飞锤产生的离心力发动机的转动给出驾驶轴向力,图2,哪一个是皮带模型的输入.因此我们开发了控制机构的模型,并将该系统与皮带代码耦合。

图2:主皮带轮上的自由体图
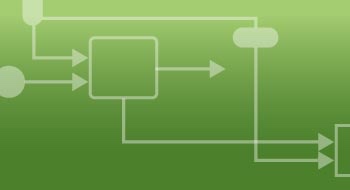
有了这些,我们就有了构建脚本的所有模型。图3中的流程图显示了算法的逻辑顺序。使用初始值的输入条件我们计算了力量的平衡,还有横档-库塔通过求解微分方程组的方法,对副带轮的换档曲线、扭矩进行了输出分析,和皮带位置。

图3:算法的逻辑顺序
这样,我们就有了一个能够感知CVT控制参数变化的模型,即因此我们可以分析他们的干扰在联轴器转速的结果中,输出扭矩,和换档比。因此建立的过程我们的汽车更快,也更便宜,因为我们可以驾驶汽车MATLAB中的几种组合这在实验上是不可能的。
结果与结论
R运行完整模型可以执行多个分析。在视频1中,可以分析连续变化的传输特性转移传动比。正如预期的那样,驱动控制机构产生的轴向力的应用会产生紧侧张力和松侧张力,从而将扭矩传输到辅助皮带轮。
视频1:连续变速箱变化期间的皮带牵引力
从沿节点的牵引力分布中可以清楚地看出皮带两侧张力的差异,如图4所示。The区域图中的节点为红色主皮带轮,蓝色上的节点辅助滑轮,和在里面绿色标记滑轮外部的节点。

图4:牵引力沿节点的分布–主滑轮上的节点(红色)、次滑轮上的节点(蓝色)、滑轮外的节点(绿色)。
传动过程中的松弛动态行为分析非常有用,因为它可以表征传动效率,而传动效率受皮带和皮带轮之间的滑动影响很大。这种行为是不可能发生的分析在静态模型中,无需对皮带进行离散化。
dri时间上的ve比率曲线,图5,对我们来说非常重要,因为传递变异决定a我们汽车的加速性能. 这条曲线作为输入进入一个纵向动力学算法,让我们随着时间的推移汽车的速度和加速度。
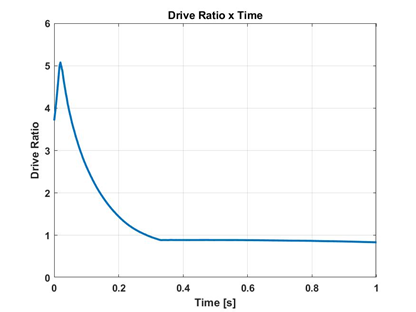
图5:随时间变化的传动比
通过在我们项目的尺寸计算中实现该模型,可以模拟实验上不可能实现的条件。此外,它还提供了美国经济的巨大变化关于CVT动态特性的理论知识,以及这些参数是如何刚度、质量、惯性,预张力会干扰汽车的纵向动力学。
未来范围
为了继续我们的工作,我们打算将此算法应用到团队已经开发的汽车纵向动力学模型中。因此,在MATLAB的同一程序中,将有可能分析CVT调整参数对整车整体加速度行为和速度的干扰。此外,我们希望今后能进行基于固定变量的控制参数优化分析,到有这个了解开发我们自己的CVT,并进行优化设计,以便在巴哈大赛中应用。
获取更新在…上我们的进展或接受任何问题s关于我们的动态CVT模型,请随时与我们联系链接爱丁还是团队的一款图片分享应用.
谢谢你的阅读,希望你喜欢信息技术.干杯
工具书类
[1]胡里奥,G。;普兰特,J.-S.安实验性val回避橡胶带模型无级变速器机械师机械和机器理论-机械《阿赫托尔》,第46节,第1037-1053页,08 2011.






评论
如需留言,请点击在这里登录到您的MathWorks帐户或创建新帐户。