传感器融合和跟踪工具箱
Diseñe,Simule Y Pruebe Sistemas de Seguimiento Y Posicionamiento多传感器
传感器融合和跟踪Toolbox™包含alloymos y Herramientas paradiseñar,Simular Y Probar Sistemas Que Fusionan Datos de Varios Sensores Para Mantener LaPercepcióndel Entorno y lalocalización。Los Ejegros de Everlencia Puillcionan联合国Punto de Partida Para El Desarrolo de laFusióndeSensessY El Seimiento Multibeto En Sistemas de Vigilancia y Vigilancia yautónomos,包含塞塞勒斯·埃雷斯岛,estuidos sistemasAéreos,塞子,壁舍,Marítimosy ammarinos。
该系统采用了雷达、被动雷达、声纳、激光雷达、EO/IR、IMU和GPS等雷达传感器。También一般datos sintéticos一个虚拟感测的部分在不同的场景下可能的算法。它的工具箱包括多目标的filtros estimación para evaluar arquitecturas的组合fusión在cuadrícula的nivel, detección和目标的sejeto o seguimento。También proporciona métricas, tales como OSPA y GOSPA, para validar el rendimiento con respenas de escenas validación (ground-truth)。
Para la aceleración de las simulaciones o el prototiado rápido, la toolbox soporta la generación de código C。
旅行:

免费白皮书
自治系统传感器融合和跟踪
espacio义警aéreo
Realico El Seguimiento Multibjeto Utilizano Datos de Sensactos Activos Y Pasivos,Tales Como Los Sensores de Radar,ADS-B Y EO / IR。个人los seguidores para gestionar objetos en movimiento。
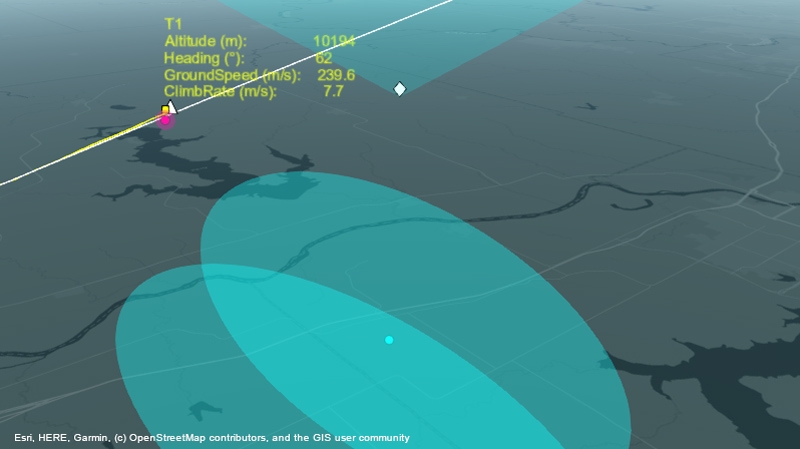
Seguimiento de联合国AviónConeCenariosCentrados en La Tierra。
Vigilancia Apacial.
Realice el Seguimiento de Varios Objetos Espaciales ultizardo Datos de Sensores de Radar Para WenerarPercepcióndeLaituaciónEspacial。Puede configurar los seguidores para que umericen un modelo de movimiento kepleriano u Otros modelos Orbitales。
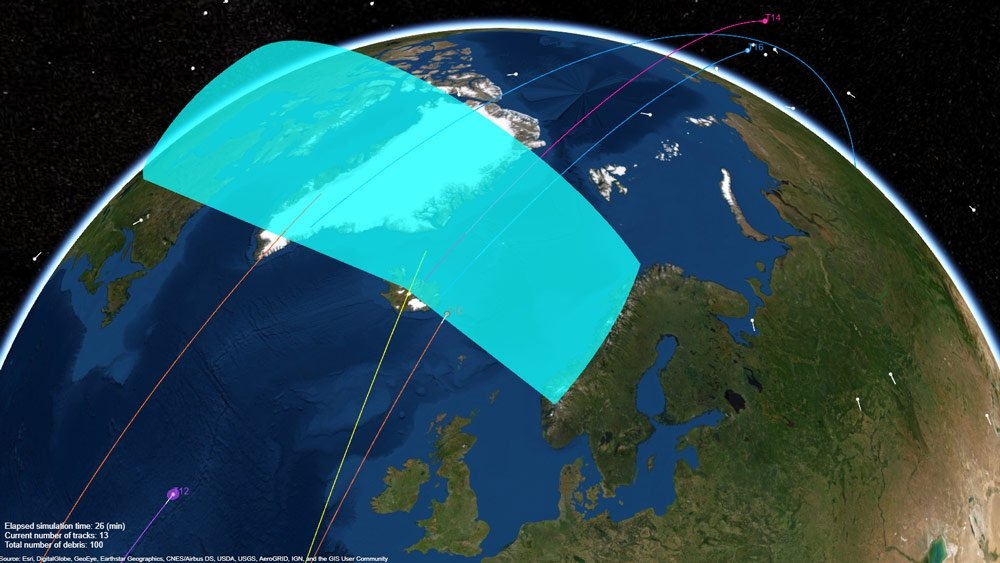
Seguimiento de desechos espaciales con modelos de movimiento kepleriano。
Vigilancia artestre ymarítima
AreaToCiones Antestres YMarítimasConverseDaRidarY Radar de Alta Alta Alta AltaCionionSto Zhiades en Apjetos Ampliados An Apeticaciones Amperestres Y radar y radar de AltaArtraución。

Seguimiento con único传感器
Modele Y Simule Seguidores MultiobeTo Para Realizar El Procesamiento Requerido en Sensores Inteligentes。Esto Cantuye Transformar Los Datos Sin Procesar en Listas de Seguimiento de Objetos。

融合centralizada
Equice el Seguimiento de Objetos Soldiados Con Un Seguidor Commertzado Que Fusiona Datos de Varios传感器Y Modalidades De Sensores。uterice un seguidor de densidad dehipótesde probabilidad(博士)Para Enferar LaCinemáticade Objetos en Movimiento,Junto Con Las Dimonses Y LaOrientacióndeLOSObjetos。Para Entornos Urbanos Complejos,Impeede Un Seguidor de Conduntos Finitos aleatorios(rfs)Basado enCuadrícula段Seguir LaOcupacióndeCadaCelda de laCuadrícula,AsíCocoSuCinemática。

FusiónNELNivel de Seguimiento
它的变化可能会随着时间的推移而改变estimación más完整的信息。Evalúe las arquitecturas de fusión轨道到轨道的系统中,在banda的ancho和系统中,对消除的结果进行控制。

Filtros deErgentaciónyAsociacióndeDatos
estime los estados de los objetos uterizando una extensalibríade filtros deergeración,tales como filtros de卡尔曼莱尔斯y no lineales,filtros multimodelo y filtros departículas。Encuentre LAS SolucionesóPimaso k-yptimas al问题deasignación2do al问题deAsignacións-d。Asigne拒绝剥夺妊娠,删除Seguimientos O Seguimientos A Seguimientos。
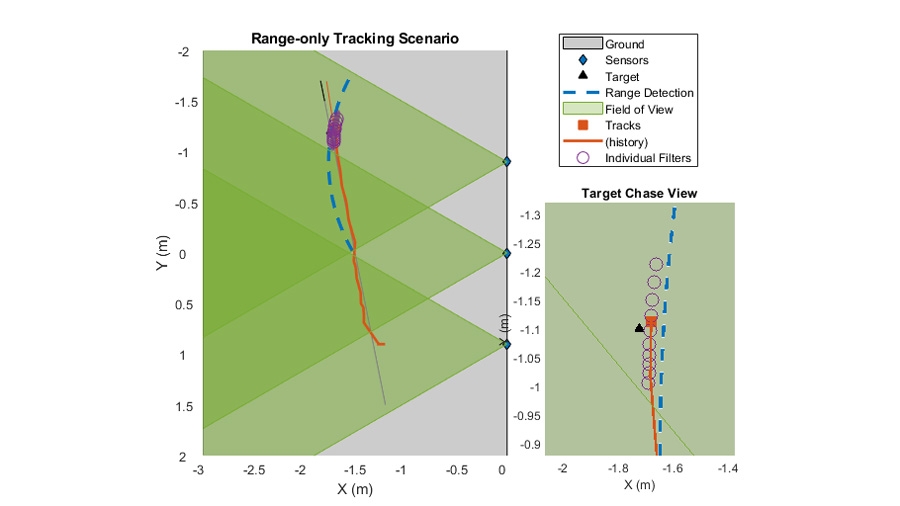
Seguimiento de solo rango con filtros没有高斯索斯。
Seguidores multiobjeto。
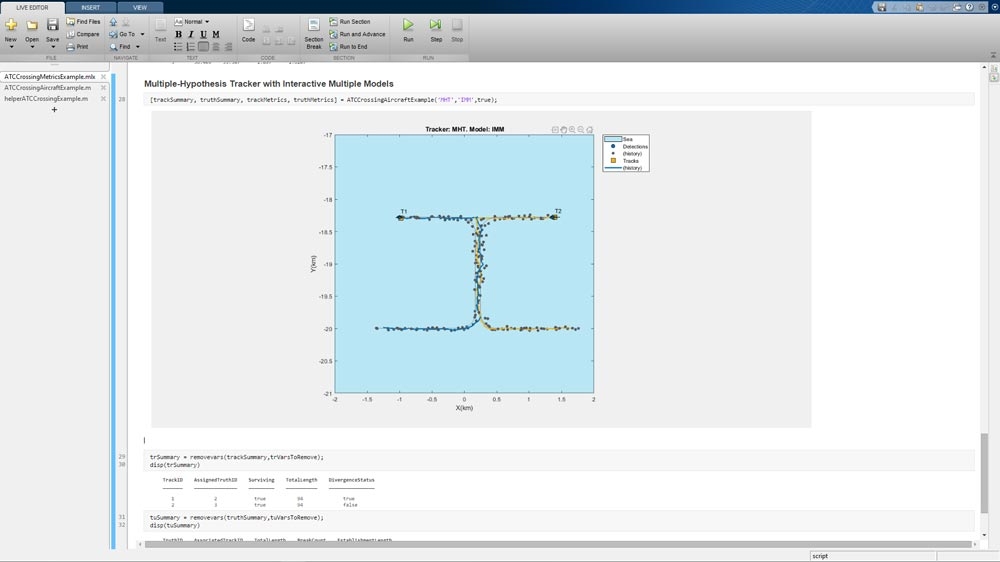
整合estimación的信息,asignación的算法和lógica的gestión的多目标信息的收集和收集。在简单的情况下,我们可以根据detección的格式,使用más próximo全球(GNN)的vecguido。背景资料difíciles,目标可追溯至ambigüedades de medición,可追溯至fácilmente可追溯至asociación de datos probabilísticos (JPDA),可追溯至hipótesis (MHT)或可追溯至博士。

Seguidores de Objetos Soldiados Y Basados enCuadrícula
利用UNEGGIDOR PHD Para Seguir LaCinemática,ElTamañoyLaOrientacióndeBojetosAmpliados。Utera Alta Datos de Sensores de AltaAccoruciónTalesComoNubes de Puntos de Lidar Y Radar,Rudars rfs rfs Basaados enCuadrísculaparaimicasdenámicasde las celdas de lacuadrículaen entornos都市人Complejos。

FusiónNELNivel de Seguimiento
Fusione Seguimientos Generados Por Sensores de Seguimiento U Otros Objetos deFusión跟踪跟踪。Diseñesistemas de seguimiento descentizados en sistemas con ancho de banda restringido。Reduzca laProfimaciónderumoresparaiminar los结果os obsoletos del seguidor。

Arquitecturas defusión.
探索las arquitecturas de seguidores evalúe los tradeoffs de diseño entre las arquitecturas de fusión轨道到轨道,de seguimiento de nivel central o de seguimiento híbrido。利用fusión estática (detección) para组合探测器的独奏ángulo和独奏rango,故事的como IR, ESM雷达biestáticos。
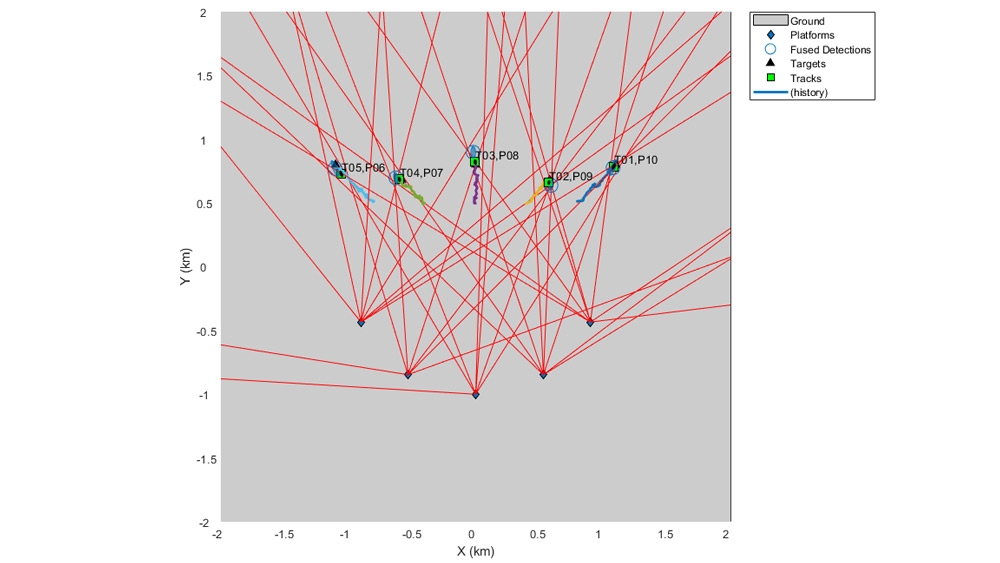
seguimiento con传感器pasivossíncronosdistribuidos。
SimulacióndeSeengiosdeSeeguimiento
Genere Informes de Sensores Para Propar Sistemas de Seguimiento。Defina Escenarios MuldplataForma Y Genere Perviles de Movimiento Para Cada Plataforma Utilizodo Trayectis as Basadas en CinePoints Y enCinemática。Addulte Firmas Y Modelos de Sensores A CADA Platagoma,Y Simule Sus InformesEstadísticamente。利用UNA有效(地面真理)SIMULADA en LAS SIMULACIONES MONTECARLO PARAV VERIGINGAR Y VINAMAR LOS SISTEMAS de Seguimiento。
我们的目标是generación
Defina Escenarios de Forma Interactiva Con App跟踪方案设计师Y Genere Scripts de Matlab Que Deperen Y Convierten LaPosición,La Velocidad Y LaOrientaciónreales de los Objetos en Distintos Marcos de Regectencia。

感知的Modelos是主动的
Modele Sensores ActivoS(包含雷达,Sonar Y Lidar)Para Wenerar Detecciones de Objetos。SimuleExploracionesMecánicasyelelictnicas en acimut,11 ofmos。Modele Sensores de Receptor de Advertencia de Radar(Rwr),Medida de SoporteElectrónico(ESM),Sonar Pasivo E Infrianrojos Para Personal Detecciones deSoloÁnicoareAlaimimieno ensecenarios de seguimiento。Modele Sistemas de Radar Y SonarMultiestáticosConEmisores Y传感器。

Simulaciones蒙特卡洛
Realice Simulaciones Montecarlo Utilizando Diferentes Vales de Ruido aleatorios。介绍了Perturbaciones en las configuraciones deValidación(地面真理)Y de Los Sensores Para alaumentar La Robustez de Las Pruebas。

localizaciónpara plataformas de seguimiento
RealiceLafusióndeSensoresImu,GPS YAltímetrospara确定r LaOrientaciónylaposiciónahaposiciónyperlgeeltiempo y permerir el seguimiento con plataformasmóviles。estime laorientacióny laposiciónpara los sistemas deNavegación纯粹(Ins)overgodeltiempo Con Algoritmos Optimizados Para Diferentes Configuraciones de Sensores,Requisitos de Salida Y Restricciones de Movimiento。
Modelos de Sensores Ins
模型传感器的统一medición惯性(IMU), GPS, altímetros e INS。这里是中等环境的parámetros,温度的变化,以及在世界范围内的模型的建立。
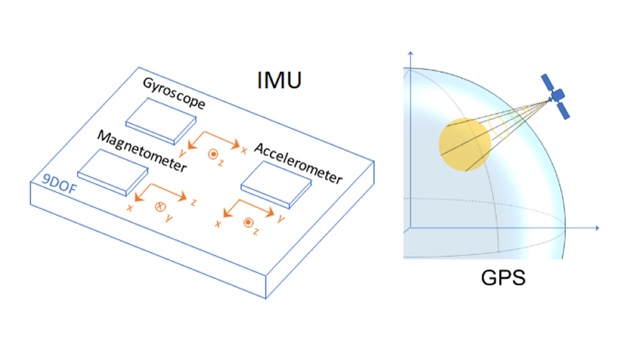
ModelAdo de Sensores IMU Y GPS Para Propar Algoritmos defusión纯粹。
ErgnacióndeLaOrientación
fusone las lecturas de acelerómetros y magnetómetros para simular una brújula electrónica (eCompass)。在acelerómetros的演讲中,giroscopios y magnetómetros与行为参考体系(AHRS)的滤镜一致,para ar la orientación。

估计丽娜姿势
estime la pose con y sin restricciones de Rumbo noholonómicasmediante传感器instiales y gps。确定LA POSE SIN GPS MEDIANTE LA FUSIONN DE SENSORES ONERCIALES CONTLYMETROS UOdometría视觉。
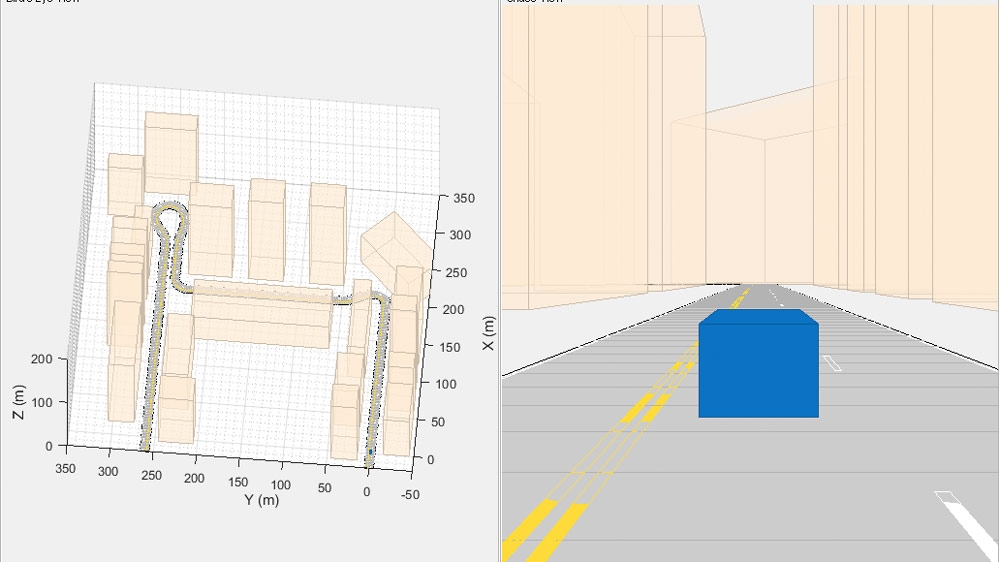
odometría视觉inercial uterizodo datos fusionados de imu ycámara。
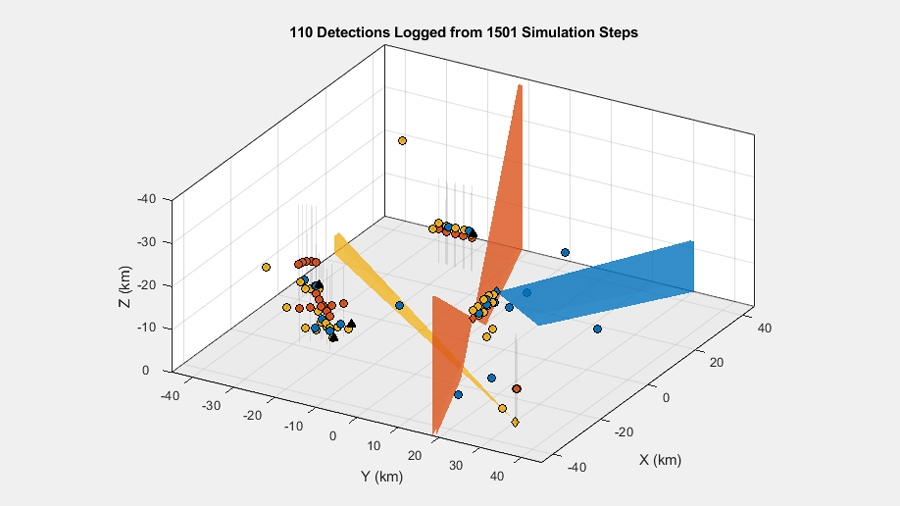
Visualizaciones de Escenarios.
代表GráficamenteLaOrientaciónyLaVelocidadde Los Objetos,Las Trayectorias deValidación(地面真理),Las Mediciones de Sensores Y Los Seguimientos en 3D。代表gráficamentelas incertidumbres dedeteccióny seguimiento。Visualice Los ID de Seguimiento Con Registros de Histors De Histor。
gráficateatral de un escenario multiplataforma。
Métricasde Sensores y seguimientos
métricas建立的故事,mantenimento y eliminación建立的故事,建立的故事,间断建立的故事以及建立的故事。Estime la precisión del seguimiento mediante posición, velocidad, aceleración y raíz del error cuadrático medium (RMSE) de velocidad de giro o o error al cuadrado estimación normalizado promedio (ANEES)。利用métricas积分的OSPA和GOSPA para的obtenter puntuación única的rendimiento。在艾伦的变化中,我们有一个传感器。

ajuste de filtros y seguidores
它是parámetros de los seguidores multiobjeto,故事的本影asignación, función de inicialización del滤镜,y的本影confirmación y eliminación, para maximizar el rendimiento。比较在seguidores与seguidores组态之间的结果。Ajuste automáticamente los filtros INS para optimizar los parámetros de ruido。

Generacion de脏污
GenereCódigoC / C ++ Y Mex Para LaAceleracióndeimulacioneso El Protipado de Escritorio ConMATLAB编码器™。雨伞cálculo的成本,para reducir的时间奉献cálculo的成本,asignación。