hittime
计算马尔可夫链命中次数
语法
描述
例子
返回预期首次命中次数
考虑这个理论的,一个随机过程的右随机转移矩阵。
建立以转移矩阵为特征的马尔可夫链P.
P = [1 0 0 0;1/2 0 1/2 0;0 0 0 1;0 0 1/2 /2];mc = dtmc (P);
画一个马尔可夫链的有向图。通过使用节点颜色直观地识别每个状态所属的通信类。
图;图幅(mc,“ColorNodes”,真正的);
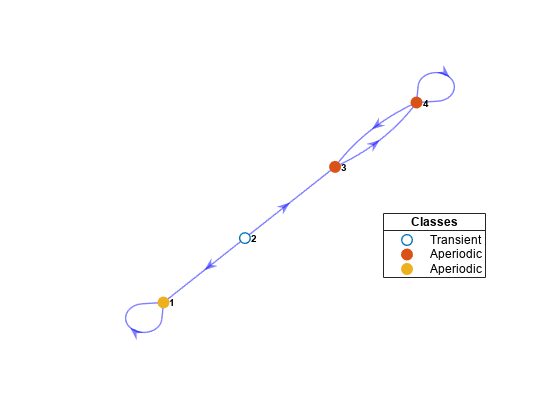
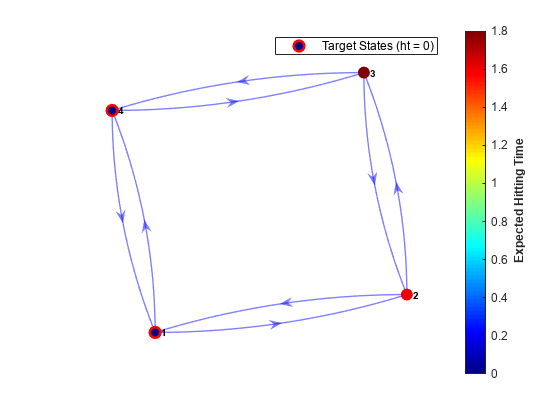
从马尔可夫链中的每个状态开始,计算状态3的预期首次命中时间。
ht = hittime (mc, 3)
ht =4×1Inf 0 2
因为状态3从状态1是不可达的,所以状态1是相对于状态3的远程状态,预期的第一次命中时间为正.
状态3可以从状态2到达,但状态2有正概率转换到状态1,状态1是吸收状态。因此,状态2是相对于状态3的远程可到达状态,预期第一次命中时间为正.
因为状态3是目标,它预期的第一次命中时间是0.
状态3从状态4开始的预期第一次击球时间是2.时间步长。
有向图的颜色节点使用预期的首次击中次数
考虑这个理论的,一个随机过程的右随机转移矩阵。
建立以转移矩阵为特征的马尔可夫链P.
P = [0 1/2 0 1/2 2/3 0 1/ 0 0 1/2 0 1/3 0 2/ 0];mc = dtmc (P);
绘制马尔可夫链的有向图mc.显示转换概率。
graphplot (mc,“ColorEdges”,真正的)
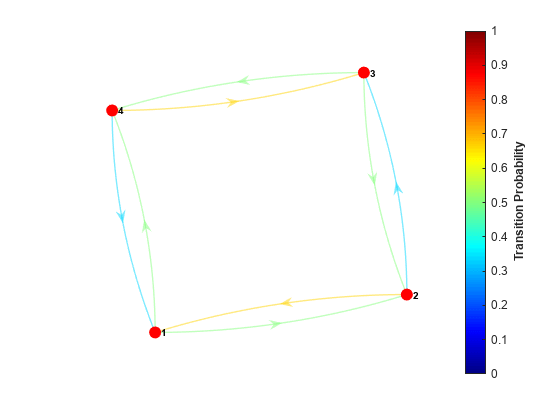
从马尔可夫链的每个状态开始,计算状态1的期望第一次命中时间。
ht=命中时间(mc,1)
ht =4×10 2.3333 4.0000 3.6667
绘制马尔可夫链的有向图。指定表示状态1的预期首次命中时间的节点颜色,从马尔可夫链中的每个状态开始。
hittime (mc, 1“图形”,真正的);
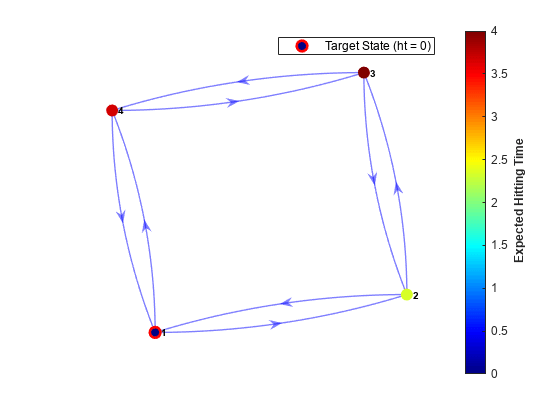
绘制另一个有向图。包括状态4作为目标状态。
hittime (mc (1 - 4),“图形”,真正的);
建立以转移矩阵为特征的马尔可夫链:
P =[1/2 0 0 0 0 0 0 0 1/3 2/3 0 0 0 1/4 0 3/4 0 0 0 0 0 0 0 0 0 1/3 2/3 1/4 1/8 1/8 1/8 1/4 1/8 0 1/6 1/6 1/6 1/6 1/6 1/6 0 0 0 0 0 0 1/2半];mc = dtmc (P);
从马尔可夫链中的每个状态开始,计算状态1的预期首次命中时间mc. 另外,绘制一个有向图并指定表示状态1的预期首次命中时间的节点颜色。
ht=命中时间(mc,1,“图形”,真正的)

ht =7×10 Inf 4 Inf Inf 2
状态2和4形成一个吸收类。因此,状态1无法从这些状态访问。吸收类相对于状态1是远程的,预期第一次命中时间为正.
状态1可以从状态5和状态6到达,但从状态5和状态6过渡到吸收类的概率不为零。因此,状态5和状态6相对于状态1是远程可达的,预期的首次命中时间为正.
从状态7开始状态1的预期第一次击球时间是2个时间步。从状态3开始状态1的预期第一次击球时间是4个时间步。
计算预期吸收时间
从一个随机生成的转移矩阵中创建一个八状态的马尔可夫链,该转移矩阵具有随机位置的50个不可行的转移。一个不可行的过渡是一个发生概率为零的转移。给各州取任意的名字。
numStates = 8;0 = 50;stateNames = strcat (repmat (“政权”,1,8),字符串(1:8));rng(1617676169)%的再现性mc = mcmix (8,“零”,零,“StateNames”, stateNames);
绘制马尔可夫链的有向图mc.指定节点颜色,以标识瞬态和循环状态以及通信类。
图;图幅(mc,“ColorNodes”,真正的);

在马尔可夫链中找到一个递归类mc通过以下步骤:
通过传递对状态进行分类
mc来分类.返回类成员身份的数组ClassStates以及指定类是否为循环类的逻辑向量ClassRecurrence.通过使用逻辑向量在数组中建立索引,从类数组中提取递归类。
[~, ClassStates IsClassRecurrent] = (mc)进行分类;复发性= ClassStates {IsClassRecurrent}
复发性=1 x4字符串"制度2" "制度3" "制度6" "制度8"
计算循环类状态的预期命中时间,从马尔可夫链中的每个状态开始。
ht=命中时间(mc,周期性);
提取并显示从瞬态开始的预期吸收时间。
istransient=~ismember(mc.StateNames,循环);absorbtime=ht(istransient);table(absorbtime,“RowNames”,mc.StateNames(istransient))
ans =4×1表吸收时间__________方案1 5.8929方案4 1方案5 1.7777方案7 4.8929
马尔可夫链混合时间的可视化
从一个随机转移矩阵中创建一个50状态的马尔可夫链,其中大多数转移是不可行的和随机放置的。
rng (1)%的再现性mc=mcmix(50,“零”,2400);
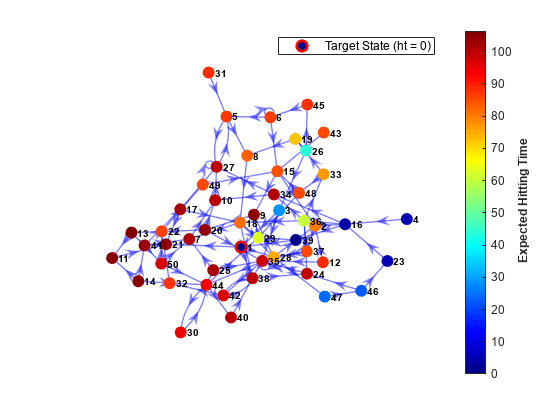
通过绘制有向图并指定节点颜色表示状态1从每个状态开始的预期第一次命中时间,可视化马尔可夫链的混合时间。
hittime (mc, 1“图形”,真正的);
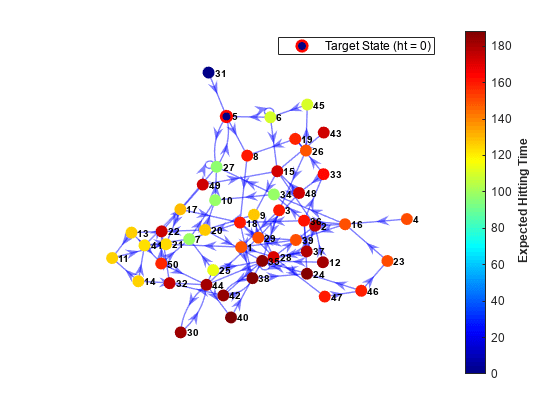
可视化状态5的马尔可夫链的混合时间。
hittime (mc 5“图形”,真正的);
计算预计通勤时间
这个预计通勤时间来自国家
州
马尔可夫链从状态过渡所需的预期时间是多少
州
(预计首次命中时间)ht
),然后返回州政府
(ht
).正式来说,预期的通勤时间是
ht
ht
.
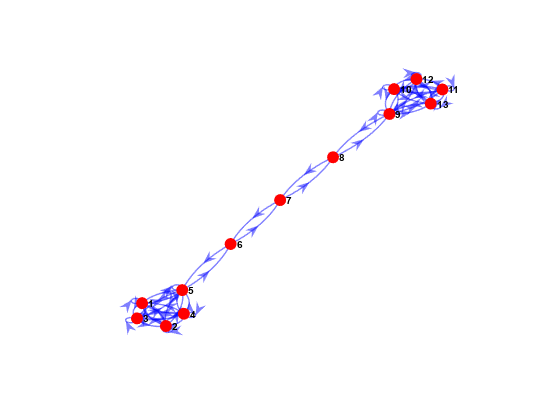
创建一个“哑铃”马尔可夫链,每个“权重”包含10个状态,“条”包含3个状态。
在每个权重内指定状态之间的随机转移概率。
如果马尔可夫链达到最接近杆的权值状态,则指定一个高概率的过渡到杆的状态。
指定条形图中状态之间的统一过渡。
rng (1);%的再现性w = 5;%哑铃DBar = [0 1 0;1 0 1;0 1 0];%哑铃棒DB=blkdiag(兰特(w),DBar,兰特(w));%转移矩阵连接哑铃和杠铃DB(w,w+1)=1;DB(w+1,w)=1;DB(w+3,w+4)=1;DB(w+4,w+3)=1;mc=dtmc(DB);
绘制马尔可夫链的有向图mc.抑制节点标签。
图;graphplot (mc);
考虑计算从状态1到状态10的预期通勤时间。
计算ht(1,10),状态10从状态1开始期望的第一次敲击时间。
ht = hittime (mc, 10);ht1to10 = ht (1);
计算ht(10,1),状态1从状态10开始期望的第一次敲击时间。
ht = hittime (mc, 1);ht10to1 = ht (10);
计算从状态1到状态10的预期通勤时间。
C1to10 = ht1to10 + ht10to1
C1to10 = 236.6165
从状态1到状态10再返回的预计通勤时间为236.62个时间步。
输入参数
输出参数
更多关于
参考文献
[1]诺里斯,j . R。马尔可夫链。英国剑桥:剑桥大学出版社,1997。
你也可以从以下列表中选择一个网站: