arx
估计ARX、ARIX、AR或ARI模型的参数
语法
描述
sys= arx (数据,(na nb nk))idpoly模型sys使用最小二乘方法和中规定的多项式阶(na nb nk).模型的属性包括协方差(参数不确定性)和估计数据与实测数据之间的拟合优度。
sys= arx (数据,(na nb nk),名称,值)“IntegrateNoise”,1估计一个ARIX或ARI结构模型,该模型适用于具有非平稳扰动的系统。
sys= arx (数据,(na nb nk),___,选择)选择.指定选择在所有其他输入参数之后。
[将估计的初始条件作为sys,集成电路) = arx (___)initialCondition对象。如果您计划使用相同的估计输入数据模拟或预测模型响应,然后将响应与相同的估计输出数据进行比较,请使用此语法。在模拟的第一部分中,结合初始条件可以获得更好的匹配。
例子
ARX模型
根据指定的ARX模型生成输出数据,并使用输出数据估计模型。
指定一个多项式模型sys0ARX结构。模型包含一个样本的输入延迟,表示为B多项式。
A = [1 -1.5 0.7];B = [0 1 0.5];sys0 = idpoly (A, B);
产生测量的输入信号u它包含随机二进制噪声和错误信号e它包含正态分布噪声。用这些信号,模拟测量的输出信号y的sys0.
u = iddata ([], idinput (300,苏格兰皇家银行的));e = iddata ([], randn (300,1));Y = sim(sys0,[u e]); / /输入当前时间
结合y和u成一个单一的iddata对象z.估计一个新的ARX模型使用z多项式阶数和输入延迟与原始模型相同。
z = [y、u];Sys = arx(z,[2 2 1])
sys =离散ARX模型:一个(z) y (t) = B (z) u (t) + e (t) (z) = 1 - 1.524 z ^ 1 + 0.7134 z z ^ ^ 2 B (z) = 1 + 0.4748 z ^ 2样品时间:1秒参数化:多项式订单:na = 2 nb = 2 nk = 1很多免费的系数:4使用“polydata”、“getpvec”、“getcov”参数及其不确定性。状态:使用ARX对时域数据“z”进行估计。拟合估计数据:81.36%(预测焦点)FPE: 1.025, MSE: 0.9846
输出显示了包含估计参数和其他估计细节的多项式。下状态,拟合估计数据结果表明,该模型的预估精度在80%以上。
AR模型
估计一个时间序列AR模型使用arx函数。AR模型没有可测量的输入。
加载包含时间序列的数据z9与噪音。
负载iddata9z9
估计一个四阶AR模型仅指定na顺序(na nb nk).
sys = arx (z9 4);
检查估计的A多项式参数和估计对数据的拟合。
param = sys.Report.Parameters.ParVector
param =4×10.7923 -0.4780 -0.0921 0.4698
适合= sys.Report.Fit.FitPercent
适合= 79.4835
ARIX模型
估计ARIX模型的参数。ARIX模型是一种集成噪声的ARX模型。
指定一个多项式模型sys0ARX结构。该模型包括一个样本的输入延迟,表示为前导入零B.
A = [1 -1.5 0.7];B = [0 1 0.5];sys0 = idpoly (A, B);
模拟的输出信号sys0使用随机二进制输入信号u和正态分布的误差信号e.
u = iddata ([], idinput (300,苏格兰皇家银行的));e = iddata ([], randn (300,1));Y = sim(sys0,[u e]); / /输入当前时间
对输出信号进行积分并存储结果易在iddata对象子.
易= iddata (cumsum (y.y), []);子=(咦,u);
估计一个ARIX模型子.设置名称-值对参数“IntegrateNoise”来真正的.
Sys = arx(zi,[2 2 1]),“IntegrateNoise”,真正的);
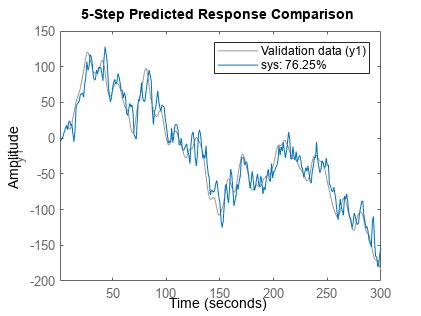
用5步预测预测模型的输出,并将结果与易.
比较(子、sys、5)
正则化的ARX模型
使用arxRegul自动确定正则化常数,并使用这些值估计一个50阶的FIR模型。
获得lambda和R值。
负载regularizationExampleDataeData;订单= [0 50 0];(λ,R) = arxRegul (eData,订单);
使用返回的lambda和R值的正则化ARX模型估计。
选择= arxOptions;opt.Regularization.Lambda =λ;opt.Regularization.R = R;sys = arx (eData、订单、选择);
获得初始条件
加载数据。
负载iddata1icz1i
估计一个二阶ARX模型sys然后返回初始条件集成电路.
na = 2;nb = 2;nk = 1;[sys,ic] = arx(z1i,[na nb nk]);集成电路
A: [2x2 double] X0: [2x1 double] C: [0 2] Ts: 0.1000
集成电路是一个initialCondition对象的自由响应sys的初始状态向量X0.你可以把集成电路当你模拟sys与z1i输入信号,比较响应与z1i输出信号。
输入参数
输出参数
更多关于
算法
QR因子分解解决了构成最小二乘估计问题的线性方程组的过确定集。
在不进行正则化的情况下,通过求解法向方程估计ARX模型参数向量θ
在哪里J是回归矩阵和吗y为测量输出。因此,
使用正则化添加正则化项
其中λ和R是正则化常数。有关正则化常数的更多信息,请参见arxOptions.
当回归矩阵大于最大尺寸中指定的arxOptions,对数据段进行分割,并对数据段进行QR分解迭代。
你也可以从以下列表中选择一个网站: