设计电流和位置缩放子系统
使用这些步骤设计当前和位置缩放子系统:
创建当前的缩放子系统。
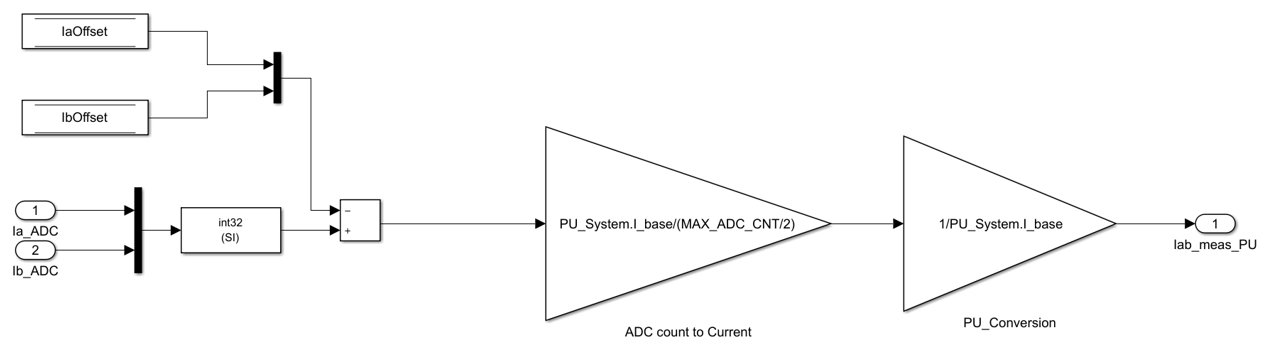
该子系统读取ADC计数中的电流并将其转换为每单位(PU)值。
在这个子系统中,IAOFFSET.和IBOFFSET.数据存储内存块是用于当前测量的ADC偏移,它们是特定于硬件的。文件
mcb_setinverterparameters.m.包含默认的ADC偏移量(ctsensaoffset.和ctsensboffset.)对于几个市售的逆变器。有关硬件中ADC偏移校准的详细信息,请参阅在开环控制中运行3相交流电机并校准ADC偏移量。在该子系统中,ADC计数中测量的电机相电流被转换为PU的电流。这
pu_system.i_base.值是指该子系统中的基本电流。有关PU系统的详细信息,请参阅每单位系统。看看mcb_setpusystem.m.计算系统的PU值的文件。您可以使用基本值来计算来自每单位的实际值。要实现现实世界或SI单位值,请参阅模型
mcb_pmsm_foc_qep_f28379d_siunit.在示例中使用使用SI单位对PMSM的田间控制。这IAOFFSET.和IBOFFSET.数据存储内存块用于共享当前和位置子系统之间的数据。
创建位置缩放子系统。

该子系统从QEP脉冲计数读取转子位置。
在这个子系统中,正交解码器块从工厂模型或硬件驱动程序块读取位置计数。块将转子机械位置转换为PU中的转子机械角度(
0.-1)。这机械到电气位置(MECH2ELEC位置)块调节QEP偏移的机械角度,并将其转换为电角度。FOC算法旋转电动机需要该转子电角度。参考PMSM电机的正交编码器偏移校准用于计算QEP编码器偏移量。
这速度测量块从转子位置计算速度。在里面速度测量阻止参数对话框,设置速度计算延迟(样本数量)参数到
20.。我们选择了价值20.在此工作流程中,使块可以测量正在测试的电机的最大速度。这速度测量块输出PU中的速度。



您创建的这些子系统包括当前的缩放和位置解码逻辑。

您还可以从以下列表中选择一个网站: