uavSensor
传感器对于无人机场景
描述
的uavSensor对象创建一个传感器,严格附加到无人机平台,作为一个指定uavPlatform对象。您可以指定不同的安装位置和方向。配置这个对象自动生成数据从一个传感器作为一个指定insSensor,gpsSensor,uavLidarPointCloudGenerator系统对象™或uav.SensorAdaptor类。
创建
描述
传感器= uavSensor (的名字,平台,sensormodel)的名字和传感器模型sensormodel,设置的名字和SensorModel属性分别。传感器被添加到平台平台指定为一个uavPlatform对象。
属性
对象的功能
读 |
从无人机传感器收集最新的阅读 |
例子
无人机场景教程
创建一个场景模拟无人机(UAV)的一组建筑之间的航班。开环仿真中的示例演示了无人机姿态更新。使用无人机场景可视化无人机飞行和生成模拟点云传感器读数。
介绍
测试自动算法,无人机的场景使您能够从环境中生成测试用例,并生成传感器数据。在工作区中您可以指定障碍,提供无人机在全球的轨迹坐标和坐标之间转换数据帧。无人机的场景使您能够想象这个信息环境的参考系。
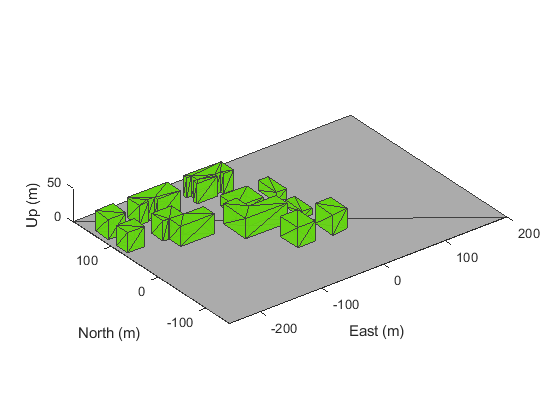
用多边形构建网格创建场景
一个uavScenario对象模型组成的一组静态障碍和可移动的物体称为平台。使用uavPlatform对象模型固定翼无人机、multirotors和场景中的其他对象。这个例子构建一个场景组成的地平面和11个建筑挤压的多边形。建筑的多边形数据加载和使用添加多边形网格。
%建立无人机的场景。现场= uavScenario (“UpdateRate”2,“ReferenceLocation”,(75 -46 0));%添加一个地平面。颜色。灰色的= 0.651 * (1、3);颜色。绿色= (0.3922 0.8314 0.0745);颜色。红色= (1 0 0);addMesh(场景,“多边形”,{(-250 -150;200 -150;200 180;-250 180],[4 0]},color.Gray)%负载建筑物多边形。负载(“buildingData.mat”);%添加组多边形从10 - 30挤压不同高度吻合。addMesh(场景,“多边形”,{buildingData {1} (1:4,:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {2} (2:5,:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {3} (2:10:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {4} (2:9,:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {5} (1: end-1,:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {6} (1: end-1,:), [0 15]}, color.Green) addMesh(场景,“多边形”,{buildingData {7} (1: end-1,:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {8} (2: end-1,:), [0 10]}, color.Green) addMesh(场景,“多边形”,{buildingData {9} (1: end-1,:), [0 15]}, color.Green) addMesh(场景,“多边形”,{buildingData {10} (1: end-1,:), 30 [0]}, color.Green) addMesh(场景,“多边形”,{buildingData {11} (1: end-2,:), 30 [0]}, color.Green)%显示的场景。show3D(现场);xlim(200年[-250])ylim (180 [-150]) zlim (50 [0])
定义无人机平台和传感器
您可以定义一个uavPlatform传感器模型的场景作为载体,使他们通过收集传感器数据模拟的场景。你可以把这个平台和不同的网格,如fixedwing,quadrotor,长方体网格。您可以定义一个自定义网格的定义由顶点和面孔。指定用于描述您平台的运动的参考系。
飞行数据加载到工作区,并创建一个quadrotor平台使用NED参考系。基于加载指定的初始位置和姿态飞行日志数据。无人机车身骨架的配置方向x设在转发正面,y设在right-positive,z设在downward-positive。
负载(“flightData.mat”)%建立平台平台= uavPlatform (“无人机”场景,“ReferenceFrame”,“内德”,…“InitialPosition”位置(:,:1),“InitialOrientation”,eul2quat(取向(::1)));%设置网格平台。添加一个旋转东方无人机主体框架的网格。updateMesh(平台,“quadrotor”{10},颜色。红色,[0 0 0],eul2quat([0 0π]))
你可以选择不同的传感器,如insSensor,gpsSensor,或uavLidarPointCloudGenerator你的无人机系统对象。激光雷达点云发生器和山uavSensor对象包含激光雷达传感器模型。指定一个传感器的安装位置,相对于无人机主体框架。
lidarmodel = uavLidarPointCloudGenerator (“AzimuthResolution”,0.3324099,…“ElevationLimits”20 [-20],“ElevationResolution”,1.25,…“MaxRange”,90,“UpdateRate”2,“HasOrganizedOutput”,真正的);激光雷达= uavSensor (“激光雷达”、平台、lidarmodel“MountingLocation”[0,0,1]);
无人机飞行平台以及预定义轨迹和收集点云传感器读数
无人机在一个预定义的轨迹移动,并收集激光雷达传感器读数。这个数据可以用来测试lidar-based映射和定位算法。
Preallocate的traj和散点图线情节,然后指定plot-specific数据源。在模拟的uavScenario,使用所提供的plotFrames从现场作为父轴输出可视化你的传感器数据正确的坐标框架。
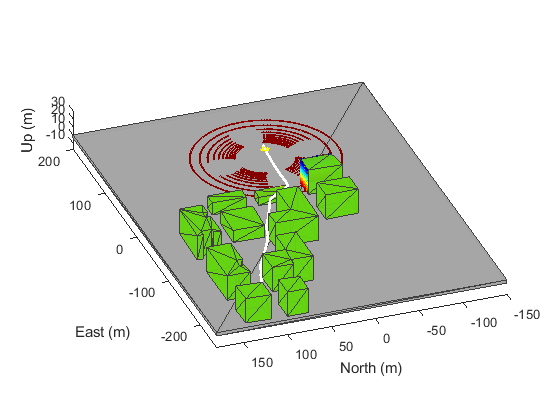
可视化的场景。
[ax, plotFrames] = show3D(现场);
为更好的可见性更新绘制视图。
xlim(200年[-250])ylim (180 [-150]) zlim(50[0])视图([-110]30日)轴平等的持有在
创建一条线轨迹图。首先创建的阴谋plot3,然后手动修改数据源属性的阴谋。这提高了绘制的性能。
traj = plot3(南南、南“颜色”(1 1 1),“线宽”2);traj。XDataSource =“位置(:2 1:idx + 1)”;traj。YDataSource =“位置(:,1,1:idx + 1)”;traj。ZDataSource =“-安置(:3 1:idx + 1)”;
创建一个点云的散点图。再次更新数据源属性。
colormap (“喷气机”)pt = pointCloud (nan (1, 1, 3));散点图= scatter3(南、南南,1 (0.3020 0.7451 0.9333),…“父”,plotFrames.UAV.Lidar);散点图。XDataSource =“重塑(pt.Location (:,: 1), [], 1)”;散点图。YDataSource =“重塑(pt.Location (:,: 2), [], 1)”;散点图。ZDataSource =“重塑(pt.Location (:,:, 3), [], 1)”;散点图。CDataSource =“重塑(pt.Location (:,:, 3), [], 1) - min(重塑(pt.Location (:,:, 3), [], 1))”;
建立了模拟。然后,遍历的位置并显示现场每次激光雷达传感器更新。推进现场,将无人机平台,并更新传感器。
设置(场景)为idx = 0:大小(位置,3)1 [isupdated lidarSampleTime, pt] =阅读(激光雷达);如果isupdated%使用快速更新移动平台的可视化框架。show3D(场景,“时间”lidarSampleTime,“FastUpdate”,真的,“父”、ax);%刷新所有情节数据和可视化。refreshdata drawnowlimitrate结束%推进现场模拟时间和移动平台。推进(现场);(移动平台,位置(:,:,idx + 1), 0 (1,6), eul2quat(取向(:,:,idx + 1)), 0 (1、3)))%更新场景中所有的传感器。updateSensors(场景)结束持有从