工具箱的主要设计师是教授Lennart Ljung是系统识别领域公认的领导者。
主要特点

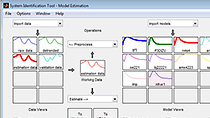
使用系统识别工具箱(上)导入、分析和预处理数据(左),估计线性和非线性模型(下),并验证估计的模型(右)。
型号鉴定数据
系统识别工具箱允许您根据测量的输入-输出数据创建模型。您可以:
- 分析和处理数据
- 确定合适的模型结构和顺序,以及估计模型参数
- 验证模型的准确性
开始使用系统识别工具箱。
您可以使用识别线性模型进行分析和控制系统设计控制系统工具箱™。您可以将最确定的模型导入万博1manbetx使用工具箱提供的块。您还可以使用已识别的模型进行预测。

识别从频域测试数据(顶部)的传递函数模型,并使用在Simulink(底部)所识别的模型。万博1manbetx
分析和处理数据
当为识别模型准备数据,您需要指定输入-输出通道名称、采样时间和样本间行为等信息。工具箱允许您将此信息附加到数据,从而简化了数据的可视化、域转换和各种预处理任务。
测量数据通常有偏移量、缓慢漂移、异常值、缺失值和其他异常。工具箱通过执行诸如此类的操作来删除这些异常去趋势、滤波、重采样和重构的缺失数据。该工具箱可以分析识别数据的适宜性和上激励,反馈回路的存在,以及非线性的存在的持久性提供诊断。
工具箱估计冲动和频率响应直接从测量数据中得到系统的数据。使用这些响应,您可以分析系统特性,如占主导时间常数、输入延迟和共振频率。您还可以在评估期间使用这些特征来配置参数模型。

用于估计模型和验证结果导入测试数据。

查看测试数据,滤除噪音,并去除偏移量。
估算模型参数
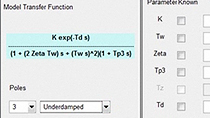
参数模型,例如传递函数或状态空间模型,使用少量的参数来捕获系统动力学。系统识别工具箱估计模型参数及其不确定性从时间响应和频率响应数据。您可以使用时间-响应图和频率-响应图来分析这些模型,例如步进图、脉冲图、波德图和极点-零图。
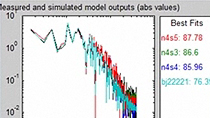
针对验证数据集估计多个模型和验证。
验证结果
系统识别工具箱帮助验证识别模型的精确性运用独立的测量数据集来自一个真实的系统。对于给定的一组输入数据,工具箱计算已识别模型的输出,并让您将该输出与来自真实系统的测量输出进行比较。您还可以查看预测误差,并生成带有置信范围的时间响应图和频率响应图,以可视化参数不确定性对模型响应的影响。
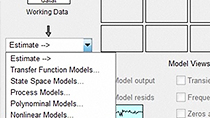
线性模型识别
估计连续时间和离散时间的传递函数和低阶过程模型。使用评估模型进行分析和控制设计。
确定最优模型的顺序和估计状态空间模型。估计ARX、ARMAX、Box-Jenkins和输出误差多项式模型。
您可以直接使用确定的线性模型控制系统工具箱功能分析和补偿设计,无需转换模型。
您还可以从控制系统工具箱中的PID调谐器应用程序中测量的输入输出数据识别过程模型。您可以交互地调整系统参数,如增益和极点位置,以匹配模型响应的测量输出。然后,系统识别工具箱可以使用这些参数值作为初始猜测,自动找到在模型和测量数据之间提供最佳拟合的参数值。一旦过程模型被创建,PID调谐器应用程序使用它来自动调整PID控制器增益。
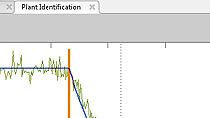
识别从测量的输入输出数据的植物模型,并使用该模型来调谐PID控制器的增益。
您还可以使用系统标识工具箱与万博1manbetx仿真软件控制设计™,当整定PID控制器块增益时。如果万博1manbetx模型线性化到零,系统识别工具箱让你估计过程模型从仿真输入输出数据在PID调谐器一旦过程模型被创建,PID调谐器使用它来调整PID控制器块增益。
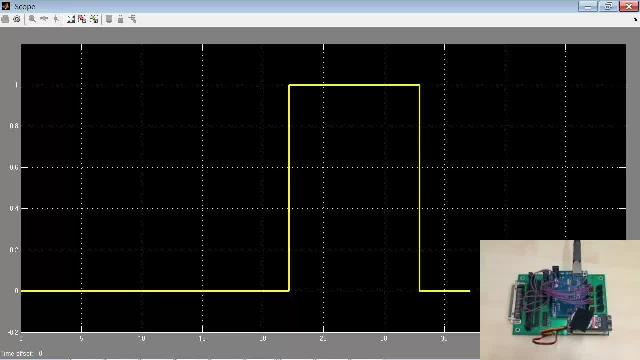
为不能线性化的模型设计一个PID控制器。利用系统辨识法从仿真输入-输出数据中辨识被试模型。

用于识别从系统辨识工具箱(顶部)时域测试数据的传递函数模型,并使用所识别的模型来调整在控制系统工具箱(底部)PID控制器MATLAB代码。
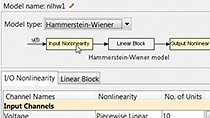
非线性模型辨识
用户定义模型中的参数估计
在线参数估计
系统辨识工具箱提供万博1manbetx用于在线参数估计的块。在线参数估计的应用包括故障监测和自适应控制。
系统辨识工具箱,您可以执行两种类型的在线参数估计的:递归多项式模型估计和递归最小二乘估计。
递归多项式模型估计块估计离散时间,多项式模型的ARX或ARMAX结构从输入和输出数据,提供给块的输入。工具箱允许您指定模型的顺序并选择要使用的估计方法。
递归最小二乘估计块估计模型输入(回归量)映射到一个模型输出的模型的参数。该模型必须是回归量的线性组合,但它可以被用来描述非线性系统。
您可以使用在线参数估计块仿真和实现。在模拟使用这些模块可以验证的算法和选择适合您应用的最佳模型结构。
算法然后可以使用自动代码生成与被部署到嵌入目标万博1manbetx仿真软件编码器™,嵌入式编码器®, 要么万博1manbetxSimulink的PLC编码器™。
计划嵌入式处理器估算参数和检测利用系统辨识工具箱中的实时动态运动变化。
时间序列数据建模
一个时间序列是一个或多个测量的输出通道与无测量的输入。系统辨识工具箱可以让你创建的时间序列数据模型,根据以前的预测未来信号值。您可以估算同时使用时域和频域数据的时间序列模型。
可以使用不同频率的循环分量估计描述时间序列变化的时间序列谱。您还可以估计参数自回归(AR)、自回归和移动平均(ARMA),ARIMA模型(ARIMA)和状态空间时间序列模型。


用于创建时间序列数据模型并使用它来预测未来信号值的MATLAB代码。
您也可以从以下列表中选择一个网站: