用于规划和控制主动铰接式车轮机器人的快速算法开发
威廉里德,澳大利亚领域机器人中心
本演示总结了用于主动铰接的车轮漫游者的指导,导航和控制(GNC)软件的开发。MARS模拟多模式横向混合动力(Mammoth)四足功能是85公斤机器人,能够改变其占地面积,堵塞障碍,重新配置其姿势以满足感应和遍历的目标。由于该车辆的GNC问题的复杂性,需要一种有效的软件开发技术。为满足此要求,已采用基于模型的设计在软件的可执行原型框架内快速开发和验证单个GNC算法。
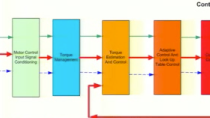
讨论的主要软件组件包括执行器和传感器接口,用于独立控制11点自由的运动器控制器,各种本地化和映射方案的融合,以及用于通过ROVE的复杂配置空间计划有效路径的运动计划。
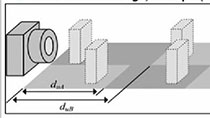
使用机器人操作系统(ROS)实现用于同时定位和映射(SLAM)的RGB-D ASUS Xtiion传感器,并与机器人系统工具箱™接口。讨论了各种遍历的结果,其中流动站执行SLAM。另外,总结了惯性测量单元数据,车轮径测量和激光测距仪数据的融合到定位方案。
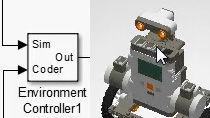
使用递归运动传播配制猛犸罗孚的运动模型。该模型表达了独立和依赖性驱动点之间的关系。提供了在模拟和火星模拟地形中驾驶其11自由的流动站的演示。
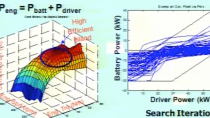
讨论的最终主题是使用的运动规划方案。开放运动计划库(OMPL)与MATLAB中生成的运动学C ++代码一起使用,以产生可行和有效的路径。运动规划在各种模拟挑战行星模拟环境中证明。
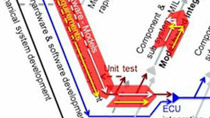
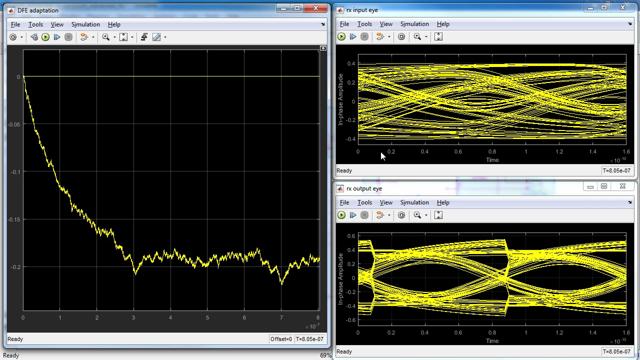
马铃薯®和模拟万博1manbetx®已被用于促进软件循环中的所有组件的集成和验证,硬件循环和完全部署的开发环境。作为流动仪横穿粗糙地形的主动铰接悬架技术的示例性工作流程,以保持恒定的身体姿势粗糙地形,以突出每个开发环境的利用方式。
由此产生的软件已启用演示新颖行星罗孚勘探平台的全部功能。自主主动铰接式悬浮试验和自主挖掘任务的结果呈现。这项工作的核心贡献是对复杂机器人系统的快速软件开发工作流程的演示。
其他资源
相关视频和网络研讨会












您还可以从以下列表中选择一个网站: