 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 洛伦谈MATLAB的艺术
洛伦谈MATLAB的艺术 MATLAB在图像处理中的应用
MATLAB在图像处理中的应用 人在仿真软件万博1manbetx
人在仿真软件万博1manbetx 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周最佳文件交换选择
本周最佳文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー模拟人生观与操作点管理
在MatlabR2017B中,我们向管理Simscape模型的操作点.
在这篇文章中,我将展示一个如何使用这个特性的例子,并描述它所引入的可能性。
以身作则
为了突出这一特性,我决定使用我的同事在MATLAB Central上提供的一个示例史蒂夫米勒r:Simscape多体中的剪刀式提升模型.
如果您不知道,现在很容易获得MATLAB中心示例。你所要做的就是点击获取扩展按钮。

在Add-Ons资源管理器中,键入您要查找的内容,一旦找到,只需单击即可添加到MATLAB.

瞬态响应
顾名思义,该模型模拟剪式升降机,液压缸使升降机上下移动。下面是一个使用力学的探险家.

如果你仔细观察结果,你会注意到在模拟的开始,在液压稳定以补偿重力之前,平台有轻微的下降。

对于该模型,这不是一个主要问题,但对于大型模型,这种类型的瞬态响应可能需要相当长的时间,因为解算器需要采取许多小步骤来准确捕捉它。
捕获工作点
为了避免每次模拟模型时因瞬态响应而损失时间,我们将模拟模型两秒钟一次,直到瞬态通过,然后使用simscape.op.create这将成为我们下一次模拟的起点。
在编程上,这看起来像:


注意,也可以从模型配置的Simscape部分配置Simscape日志记录和操作点。
还有什么?
需要指出的重要一点是,Simscape操作点非常灵活。这包括:
- 可以通过编程方式添加节点、删除节点和修改节点
- 如果模型包含没有相应节点的块,则将使用块对话框规范
- 如果操作点包含模型中没有相应块的节点,那么这些节点将被忽略
让我们以这个简单的热液模型为例。

我们可以根据记录的数据创建操作点:

现在,假设我们决定再添加一个管道:

如果尝试使用先前创建的工作点模拟此模型,它将模拟良好,但是,第二条管道将以“块”对话框中指定的压力和温度开始。相反,我们可以复制操作点中已经存在的管道节点,并将其作为新节点添加到操作点。
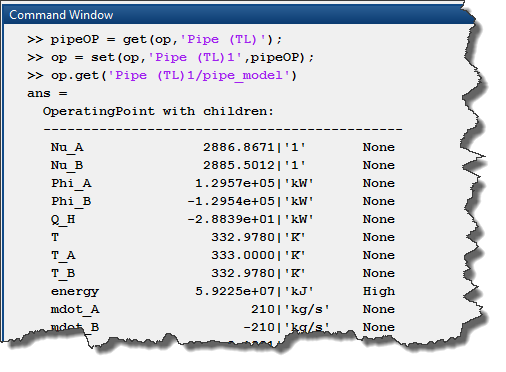
而现在第二个管道作业点也将从作业点对象进行控制。
下一步是什么?
您是否已经在使用Simscape操作点功能?如果没有,请从以下文档页面开始:
请在下面的评论中告诉我们您对该功能的看法。







评论
如需留言,请点击在这里登录到您的MathWorks帐户或创建新帐户。