主要内容
开始使用模型预测控制工具箱
设计和仿真模型预测控制器
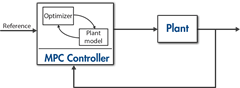
模型预测控制工具箱™提供了函数、应用程序和Simulink万博1manbetx®块设计和仿真控制器使用线性和非线性模型预测控制(MPC)。工具箱允许您指定植物和干扰模型、水平、约束和权重。通过运行闭环仿真,可以评估控制器的性能。
您可以通过在运行时改变控制器的权重和约束来调整控制器的行为。工具箱提供可部署的优化求解器,还允许您使用自定义求解器。为了控制非线性设备,可以实现自适应、增益调度和非线性MPC控制器。对于具有快速采样率的应用程序,工具箱允许您从常规控制器生成显式模型预测控制器或实现近似解。
为了快速原型和嵌入式系统实现,包括优化求解器的部署,工具箱支持C代码和IEC 61131-3结构化文本生成。万博1manbetx
教程
- 使用MPC设计器设计控制器
采用MPC设计器设计连续搅拌釜式反应器(CSTR)的模型预测控制器。
- 在Simulink中设计MPC控制器万博1manbetx
使用MPC设计器为Simulink模型设计和仿真模型预测控制器。万博1manbetx
- 在命令行上设计MPC控制器
在MATLAB中设计并仿真模型预测控制器®命令行。
- 单输入单输出装置的模型预测控制
为SISO设备创建并模拟模型预测控制器。
- 多输入单输出装置的模型预测控制
为具有多个输入和单个输出的设备创建并模拟模型预测控制器。
- 多输入多输出非线性对象的模型预测控制
为MIMO装置创建并模拟模型预测控制器。
关于模型预测控制
- 什么是模型预测控制?
介绍MPC的主要概念。
- MPC信号类型
植物输入是影响植物的自变量,而植物输出是希望控制或监控的因变量。
- 货币政策委员会预测模型
模型预测控制器使用对象、扰动和噪声模型进行预测和状态估计。
- 控制器状态估计
MPC控制器使用它们的当前状态作为预测的基础。通常,控制器的状态是不可测量的,必须进行估计。
- 优化问题
模型预测控制器通过在每个控制区间求解一个二次规划来计算最优操纵变量控制动作。
- QP解决者
模型预测控制器QP求解器将MPC优化问题转化为一般形式的二次规划问题。

你也可以从以下列表中选择一个网站:
