主要内容
机器人建模和仿真
运动和运动模型,凉亭共同仿真
使用机器人时,建模和模拟使您能够通过模拟现实世界的行为来快速和测试场景的原型算法。这些功能为机械手和移动机器人提供了运动型号,以模拟其运动。该工具箱还支持Simulink的同万博1manbetx步跳转万博1manbetx®凉亭与物理模拟设计您的机器人算法。
职能
块
话题
通过以恒定间隔执行代码,您可以准确地时间和计划任务。
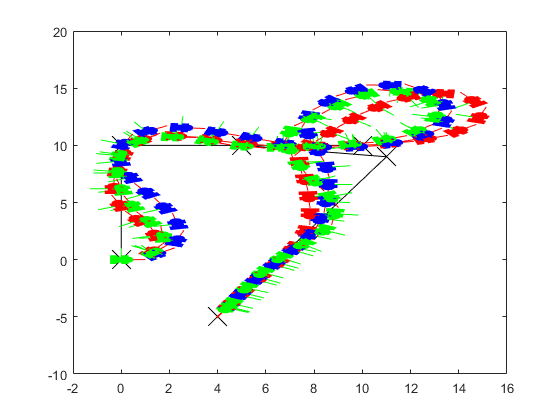
此示例显示如何在环境中建模不同的机器人运动学模型并比较它们。
在Simulink和Gazebo之间执行共同仿真万博1manbetx
此示例显示如何在Simulink™和Gazebo之间设置同步模拟以发送命令并从凉亭接收数据。万博1manbetx
用Simulink控制凉亭中的差动驱动机器人万博1manbetx
此示例显示如何使用Simulink控制Gazebo共模中的差分驱动机器人。万博1manbetx
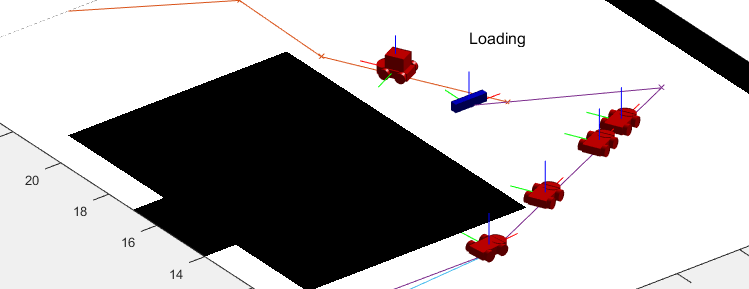
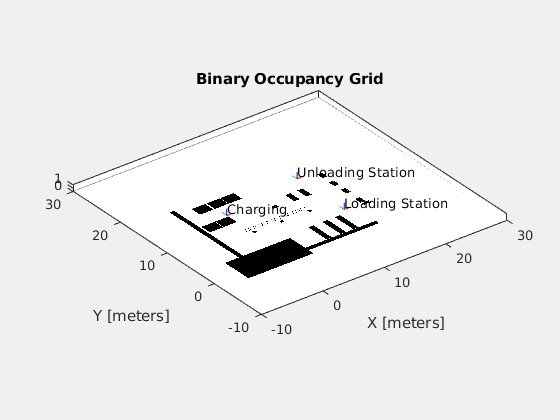
此示例显示如何控制和模拟在仓库设施或配送中心工作的多个机器人。
此示例显示如何模拟凉亭的仓库机器人。
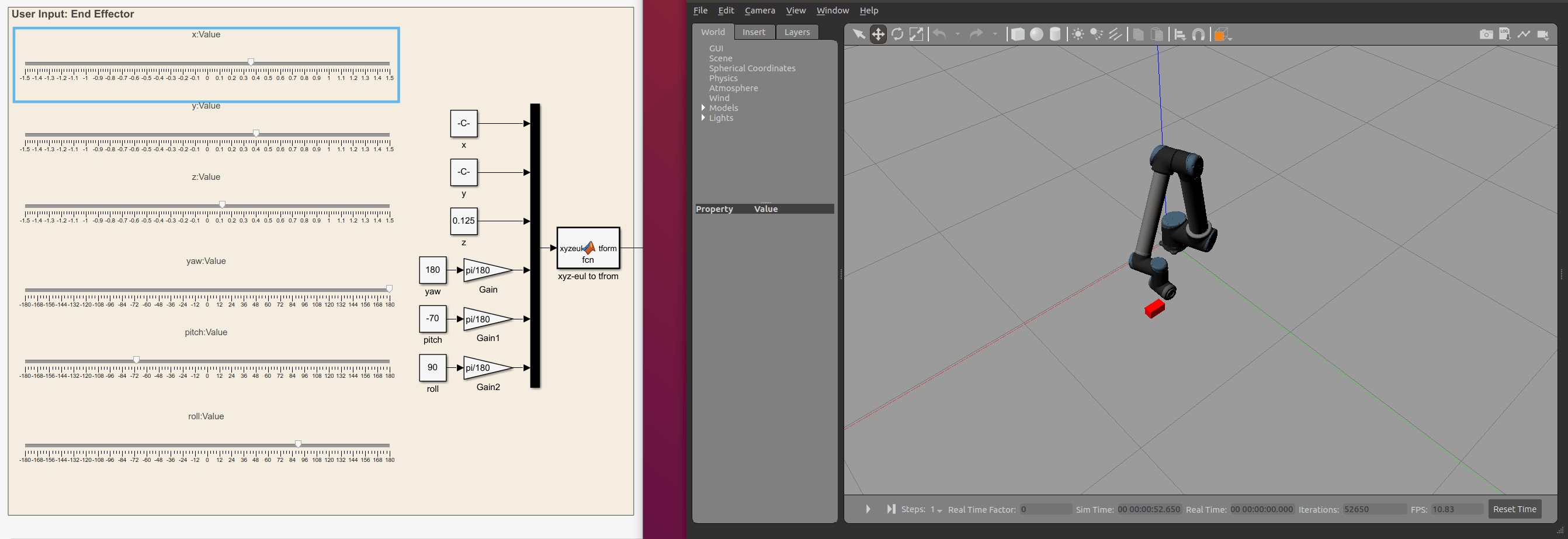
配置Gazebo和Simulink以进行操万博1manbetx纵机器机器人的共模
设置UR10机器人模型,以在凉亭和Simulink™之间执行共同仿真。万博1manbetx
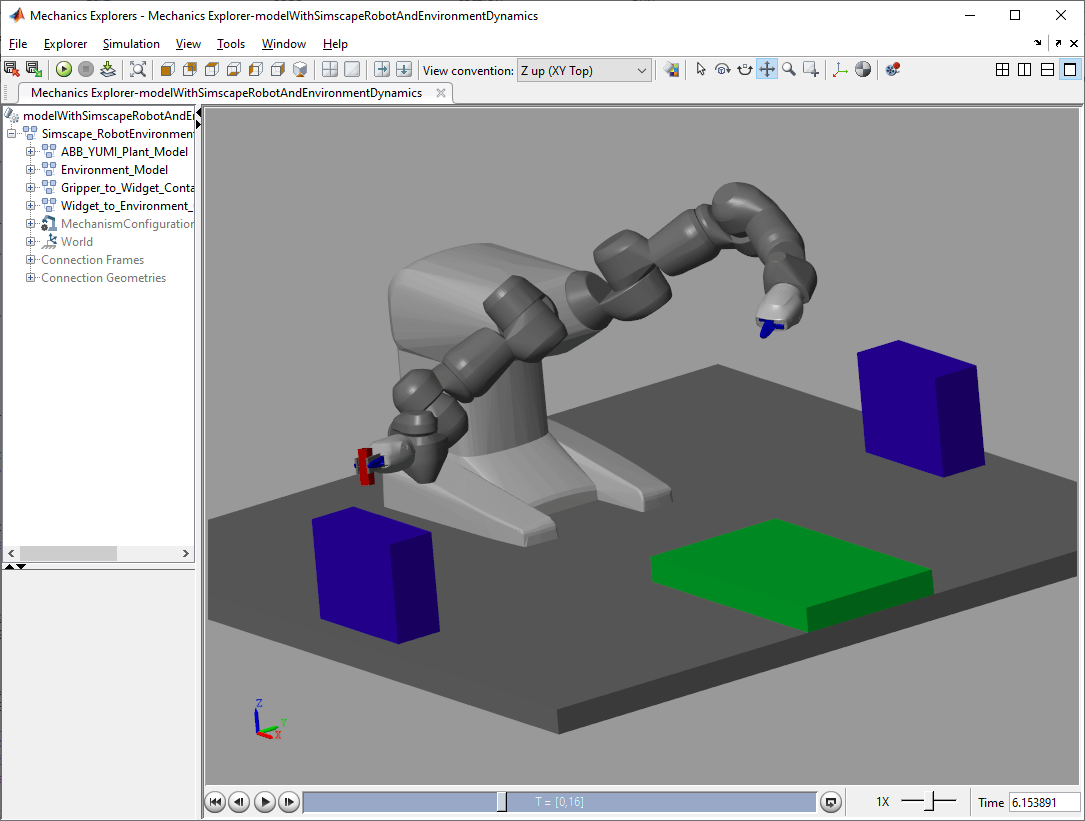
控制机械手机器人与Simulink和Gazebo共同仿真万博1manbetx
使用Simulink和Gazebo的共模拟模拟机器人操纵器的控制。万博1manbetx
使用Kinova Gen3操纵器计划和执行任务和联合空间轨迹
此示例显示如何生成和模拟内插关节轨迹以从初始到所需的末端执行器姿势移动。
该示例显示了如何使用非线性模型预测控制从初始到所需的末端执行器姿势计划闭环碰撞机器人轨迹。
此示例显示如何在闭环控制下模拟机器人机械手的关节空间运动。
特色例子
您还可以从以下列表中选择一个网站: