主要内容
Pcregisterndt.
使用NDT算法注册两个点云
句法
描述
例子
使用NDT算法对齐两个点云
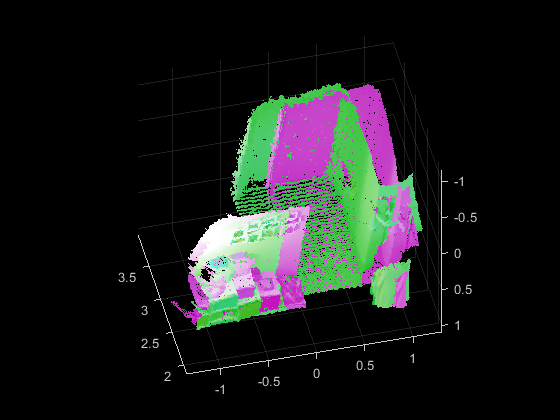
装载点云数据。
ld = load('livingroom.mat');移动= ld.livingroomdata {1};fixed = ld.livingroomdata {2};pcshowpair(移动,修复,'verticalaxis'那'是'那'verticalaxisdir'那'下')
提高NDT登记算法的效率和准确性,下置移动点云。
移动= pcdownsample(移动,'gridaverage',0.1);
将点云体变为侧面的点云0.5。使用NDT算法应用刚性注册。
gridstep = 0.5;tform = pcregisterndt(移动,固定,gridstep);
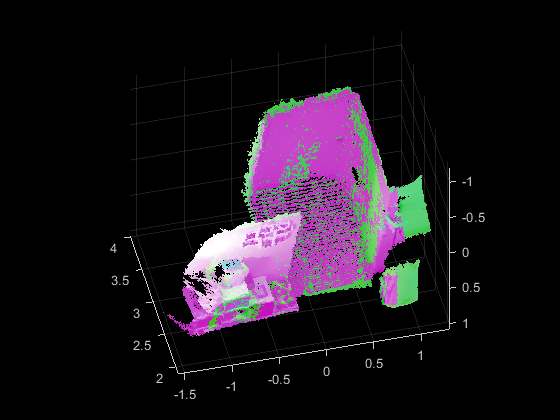
可视化对齐。
vishtreg = pctransform(移动,tform);PCShowpair(搬家脚,固定,'verticalaxis'那'是'那'verticalaxisdir'那'下')
输入参数
输出参数
算法

兼容性考虑因素
参考资料
[1] Biber,P.和W.Straßer。“正常分布变换:激光扫描匹配的新方法。”IEEE / RSJ智能机器人和系统国际会议的诉讼程序(IROS)。拉斯维加斯,NV。卷。2003年11月3日,第2743-2748号。
[2] Magnusson,M。“三维正常分布变换 - 注册,表面分析和环路检测的有效表示。”博士论文。Örebro大学,Örebro,瑞典,2013。
扩展能力
也可以看看
功能
pcdenoise.|pcdownsample.|PCFitplane.|PCMerge.|pcregistercorr.|Pcregistercpd.|Pcregistericp.|pcshow.|pcshowpair.|pctransform.
对象
在R2018A介绍
您还可以从以下列表中选择一个网站:
