造型
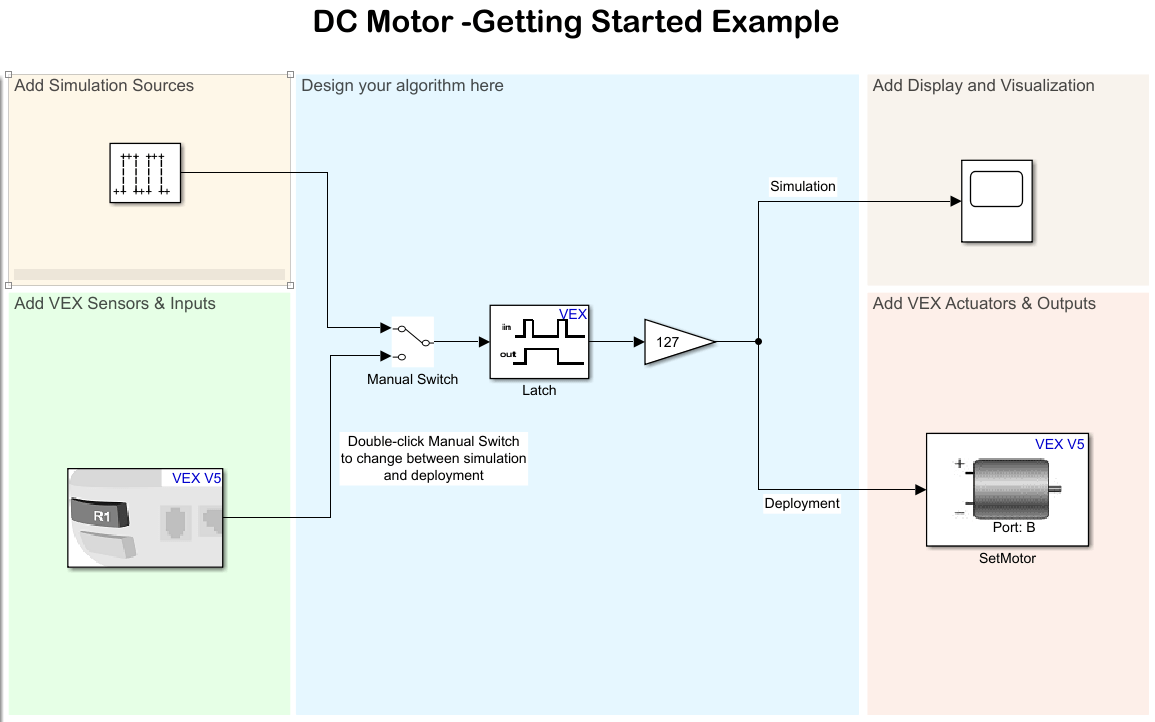
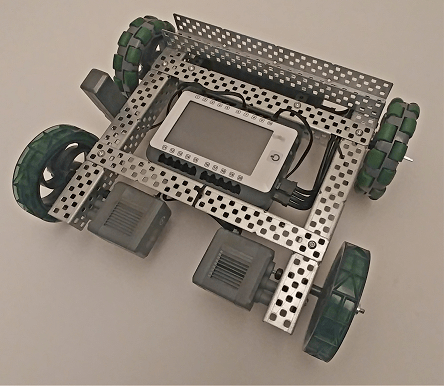
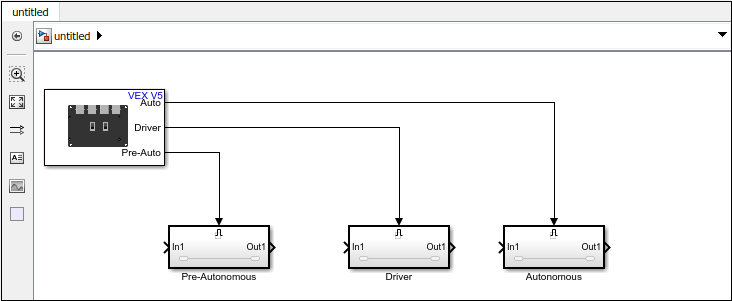
准备模型硬件连接,添加模块,以支持VEX万博1manbetx®EDR V5机器人脑中
块
主题
对VEX EDR V5机器人脑中建立和运行的应用程序的参数和配置选项
从Simulink的日志信号万博1manbetx®在SD卡上的模型安装在目标硬件
- 第1步:为先决条件测井信号
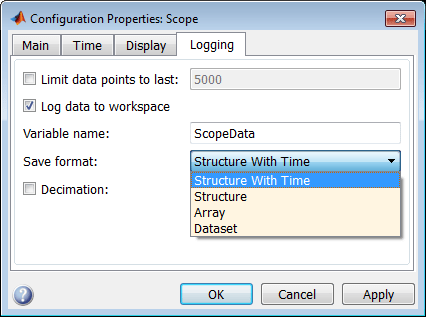
- 第2步:配置单板参数并启用MAT-文件记录
- 第3步:配置模型登录信号的SD卡
- 第4步:运行模型的目标硬件
- 第5步:进口MAT文件到MATLAB
精选示例
您还可以选择从下面的列表中的网站:
