Modeling
Prepare model for hardware connection, add blocks to support VEX®EDR V5 Robot Brain
Blocks
Topics
- Model Configuration Parameters for VEX EDR V5 Robot Brain
Parameter and configuration options for creating and running applications on VEX EDR V5 Robot Brain
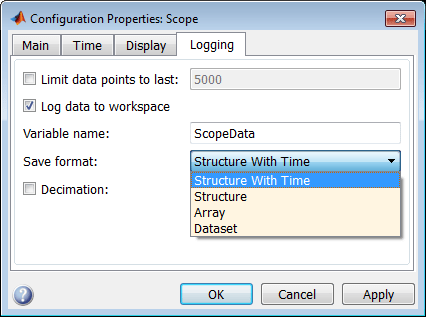
- Log Signals on an SD Card
Log signals from Simulink®models on an SD card mounted on the target hardware
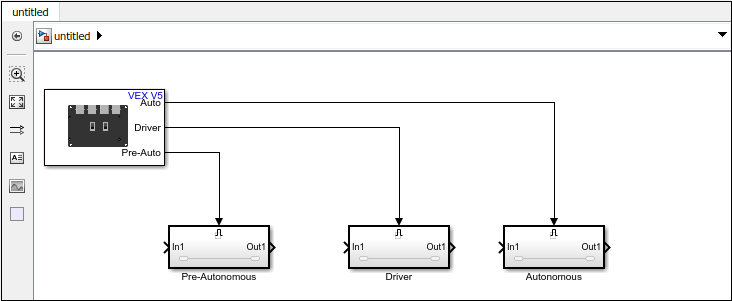
- Creating Touch Screen Controls and Displays for VEX V5 Robot Brain
在VEX EDR V5机器人大脑上部署显示和按钮仪表板块。
- Monitoring Signals for Gyroscope Calibration Using the VEX V5 Touch Screen
Monitor signals for Gyroscope calibration using the VEX V5 Robot Brain.
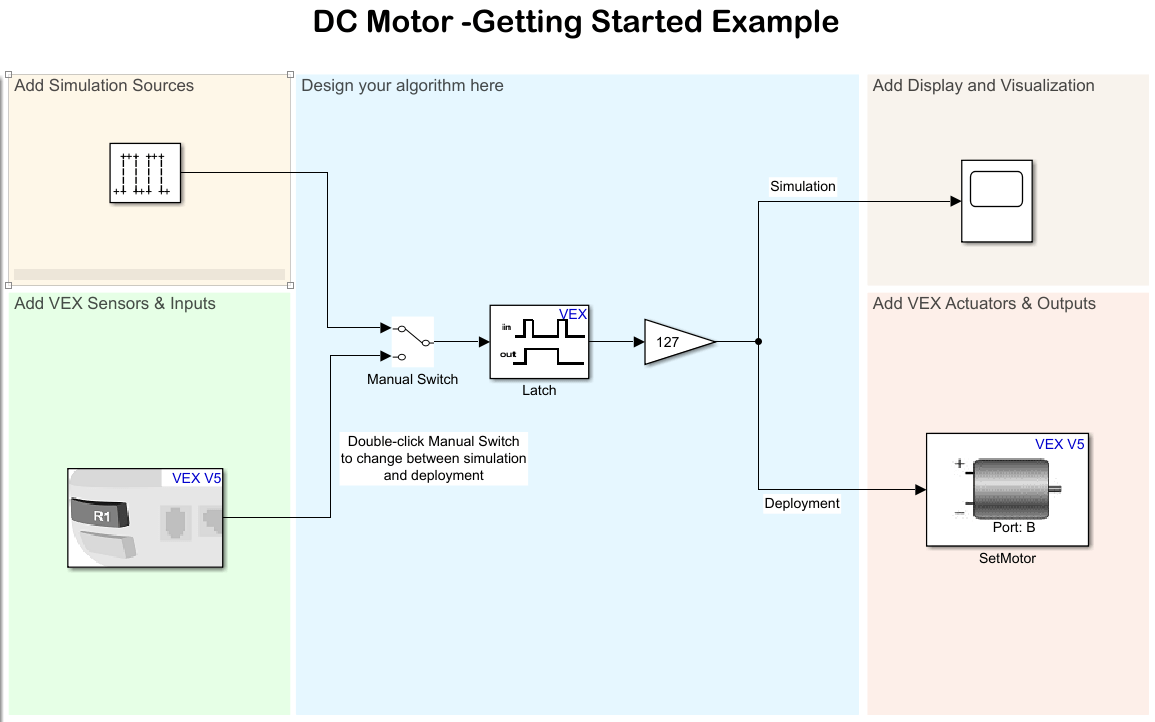
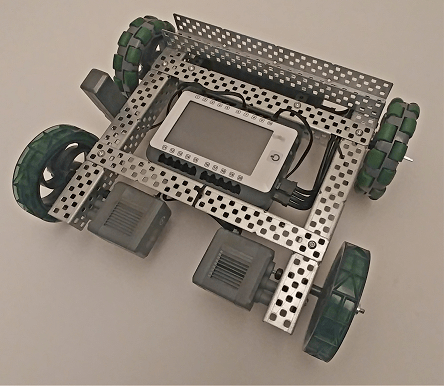
- Simulate a VEX Robot with Simulink and Gazebo
Model robot’s control algorithm in Simulink and Simulate the robot in Gazebo
- Set Up Gazebo Simulation Environment
Model robot’s control algorithm in Simulink and Simulate the robot in Gazebo
- Transitioning from Gazebo Simulation to Deployment
Transition programming to the actual robot
- 故障排除凉亭模拟
解决您在凉亭模拟环境中模拟模型时可能遇到的问题
Featured Examples










You can also select a web site from the following list:
Americas
- AméricaLatina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- 丹麦(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- 挪威(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)