反馈
多模型反馈连接
描述
系统=反馈(sys1, sys2)系统用于模型对象的负反馈互连sys1, sys2.

从图中可以看出,闭环模型系统有u作为输入向量和y作为输出向量。两个模型,系统1和系统2,必须是连续的或离散的样本时间相同。
系统=反馈(sys1, sys2,feedin,feedout)系统使用输入和输出连接指定使用feedin和feedout. 如果只想连接MIMO系统可用I/O的子集,请使用此语法。
系统=反馈(sys1, sys2(“名称”)系统使用由MIMO模型的各个I/O名称指定的反馈连接系统1和系统2.使用“姓名”只有当一组MIMO系统中所有需要的I/ o都正确命名时才会标记。
例子
具有单元反馈的对象与控制器
摆模型控制器.mat包含一个SISO倒立摆传递函数模型G及其相关的PID控制器C.

将倒立摆和控制器模型加载到工作空间。
装载(“摆模型控制器”,“G”,“C”); 尺寸(克)
具有1个输出和1个输入的传递函数。
尺寸(C)
1输出1输入的PID控制器。
使用反馈要创建负反馈循环,请使用G和C.
sys=反馈(G*C,1)
sys=1.307e-06秒^3+3.136e-05秒^2+5.227e-06秒-------------------------------------------------------2.3e-06秒^4+1.725e-06秒^3-4.035e-05秒^2-5.018e-06秒连续时间传递函数。
系统为通过负反馈得到的闭环连续时间传递函数。反馈将PID控制器模型C转换为传递函数,然后再将其连接到连续时间传递函数模型G。有关详细信息,请参阅确定模型类型的规则.
具有负反馈路径控制器的对象
对于这个例子,考虑两个描述一个植物的传递函数G和控制器C分别地
创建设备和控制器传递函数。
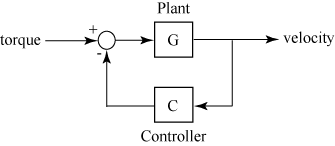
G = tf([2 5 1],[1 2 3],“inputname”,“扭矩”,“outputname”,“速度”);C=tf([5,10],[1,10]);
使用反馈要创建负反馈循环,请使用G和C.
sys=反馈(G,C,-1)
sys=从输入“扭矩”到输出“速度”:2秒^3+25秒^2+51秒+10--------------------11秒^3+57秒^2+78秒+40连续时间传递函数。
系统结果闭环传递函数是用负反馈得到的吗扭矩作为输入和速度作为输出。
正反馈回路与工厂和控制器
对于这个例子,考虑两个描述一个植物的传递函数G和控制器C分别地

创建设备和控制器传递函数。
G = tf([2 5 1],[1 2 3],“inputname”,“扭矩”,“outputname”,“速度”);C=tf([5,10],[1,10]);
使用反馈创造积极的反馈循环使用G和C.
sys =反馈(G、C + 1)
sys=从输入“扭矩”到输出“速度”:-2秒^3-25秒^2-51秒-10----------------------9秒^3+33秒^2+32秒-20连续时间传递函数。
系统是使用正反馈获得的闭环传递函数扭矩作为输入和速度作为输出。
MIMO系统的负反馈回路
基于下面的图,考虑在负反馈回路中连接两个MIMO传输函数,具有两个输入和两个输出。
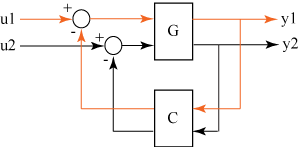
对于本例,使用以下方法创建两个随机连续状态空间模型rss.
G=rss(4,2,2);C=rss(2,2,2);大小(G)
具有2个输出、2个输入和4个状态的状态空间模型。
尺寸(C)
有2个输出,2个输入,2个状态的状态空间模型。
使用反馈根据上图将两个状态空间模型连接成一个负反馈环路。
sys =反馈(G、C, 1);大小(系统)
具有2个输出、2个输入和6个状态的状态空间模型。
得到的状态空间模型系统是一个具有6个状态的2输入2输出模型。负反馈回路完成后,
的第一个输出
G连接到的第一个输入C第二次输出
G连接到的第二个输入C
基于I/O名称的反馈环路
mimoPlantAndController.mat包含一个2输入,2输出的传递函数工厂模型G2输入2输出传递函数控制器模型C连接方式如下:

首先,将设备和控制器模型加载到工作区。
装载(“mimoPlantAndController.mat”,“G”,“C”); 尺寸(克)
具有两个输出和两个输入的传递函数。
尺寸(C)
具有两个输出和两个输入的传递函数。
默认情况下,反馈将连接的第一个输出G对第一个输入C和第二个输出G第二个输入C.为了按照图连接工厂和控制器,为两个系统分别命名I/ o,以确保连接正确。
G.InputName
ans =2x1电池{“扭矩”}{‘角’}
G.OutputName
ans =2x1电池{“速度”}{‘力’}
C.输入名称
ans =2x1电池{'force'}{'velocity'}
C.OutputName
ans =2x1电池{'angle'}{'torque'}
然后使用“姓名”以反馈命令根据I/O名称进行连接。
sys =反馈(G、C、“姓名”);
由此得到的闭环负反馈传递函数系统按要求的顺序拥有反馈连接。
在反馈循环中指定输入和输出连接
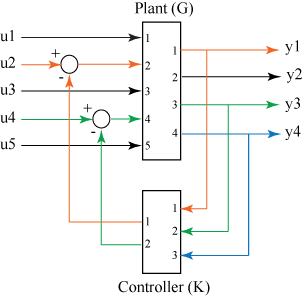
考虑一个状态空间工厂G具有五个输入、四个输出和一个状态空间反馈控制器K有三个输入和两个输出。1, 3,和4的产量G必须连接到控制器K输入,控制器输出到设备的输入2和4。
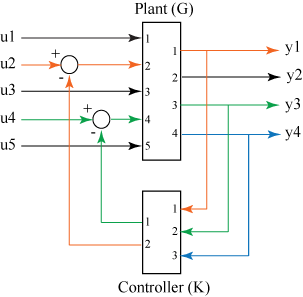
对于本例,使用以下方法生成随机连续时间状态空间模型rss对于这两个G和K.
G=rss(3,4,5);K=rss(3,2,3);
定义feedout和feedin基于反馈回路中要连接的输入和输出的向量。
反馈输入=[2 4];反馈输出=[1 3 4];系统=反馈(G,K,反馈输入,反馈输出,-1);大小(系统)
具有4个输出、5个输入和6个状态的状态空间模型。
系统所得到的闭环状态空间模型是否通过连接的指定输入和输出得到G和K.
输入参数
feedin- - - - - -要使用的输入的子集
矢量
要使用的输入子集,指定为向量。
从数字上看,,feedin包含MIMO植物的输入向量的指标P并指定输入的子集u在反馈回路中涉及到。结果模型系统具有与相同的输入G,保留他们的命令。
例如,请参见在反馈循环中指定输入和输出连接.
feedout- - - - - -要使用的输出子集
矢量
标志- - - - - -类型的反馈
-1(默认)|+ 1
反馈类型,指定为-1对于负面反馈或+ 1积极的反馈。反馈默认情况下假定为负面反馈。
输出参数
限制
反馈连接必须没有代数环。例如,如果D1和D2是的馈通矩阵
系统1和系统2,这个条件等价于:我+ D1D2使用负反馈时非奇异
我− D1D2使用正反馈时的非奇异性
你也可以从以下列表中选择一个网站:
