viewgoal.
视图优化目标;根据调优目标验证设计
描述
viewGoal (显示调优目标或调优目标矢量的图形视图,指定为雷)TuningGoal对象。调优目标图的形式取决于所使用的特定调优目标。时域调优目标的图通常显示调优目标中指定的目标时域响应。频域调优目标的图通常显示一个阴影区域,表示违背调优目标的区域。
当您提供调整目标的传染媒介时,viewgoal.在单个数字窗口中的单独轴上绘制每个调整目标。
例子
将调谐目标视为频率的函数
创建一个调整目标,可以从信号中约束响应'D'另一个信号“y”在大于1的频率下以20db /decade滚动。调谐目标还在频率范围[0,1]中施加干扰抑制(最大增益为1)。
Gmax = frd([1 1 01],[0 1 100]);要求= TuningGoal。MaxGain ('du'那'U', gmax);
当你使用频率响应数据(的朋友)模型绘制增益约束或循环形状的界限,调谐目标内插限约。该插值将约束转换为频率的平滑函数。使用ViewGoAL检查内插增益约束。
viewGoal(要求)
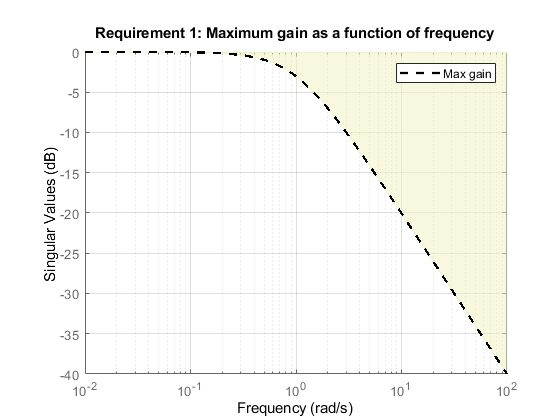
虚线显示了调整目标中指定的增益配置文件。阴影区域表示违反调谐要求的增益值。有关解释调整目标图的更多信息,请参阅可视化调整目标。
根据调优目标可视化调优响应
根据调优目标检查控制系统的调优响应,以确定在何处以及在多大程度上违背了调优目标。这种可视化可以帮助您确定调优的控制系统是否接近于满足您的软需求。
打开要调整的控万博1manbetx制系统的Simulink®模型。
open_system ('rct_airframe2')
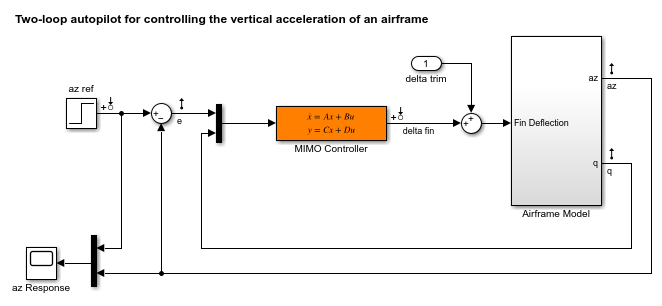
创建调整目标。在此示例中,使用跟踪,滚动,稳定性余量和干扰拒绝调整目标。
req1 = tuninggoal.tracking(“阿兹ref”那“阿兹”1);Req2 = TuningGoal。获得(“三角洲鳍”那“三角洲鳍”[1 0],特遣部队(25日));Req3 = TuningGoal。利润(“三角洲鳍”,7,45);maxgain = frd([2 200 200],[0.02 2 200]);req4 = tuninggoal.gain(“三角洲鳍”那“阿兹”,maxgain);
创建一个SLTUNER.接口,并将这些调优目标指定为软目标来调优模型。
ST0 = slTuner ('rct_airframe2'那'mimo controller');addpoint(st0,“三角洲鳍”);rng (“默认”);[ST1,FSOFT] = SYSTUNE(ST0,[REQ1,REQ2,REQ3,REQ4]);
Final:Soft = 1.13,硬= -Inf,迭代= 95
验证调谐系统是否满足边距要求。
图;viewGoal (Req3,相约)
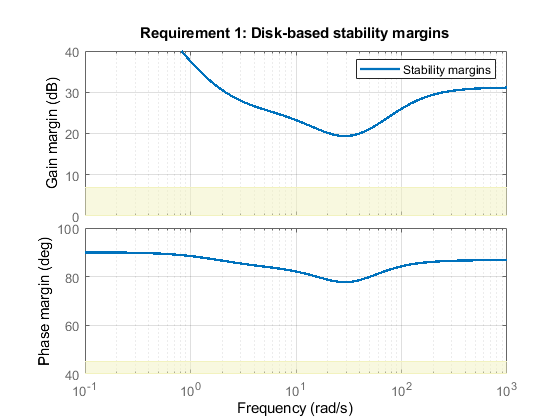
阴影区域对应于7 dB增益边缘和45度幅度的目标下降的边距。实线表明在所有频率都满足边缘要求。
与跟踪和干扰拒绝调整目标相比,检查系统响应。当您提供调整目标的传染媒介时,viewgoal.把它们画在单独的坐标轴上。
图viewGoal ([Req1 Req4],相约)
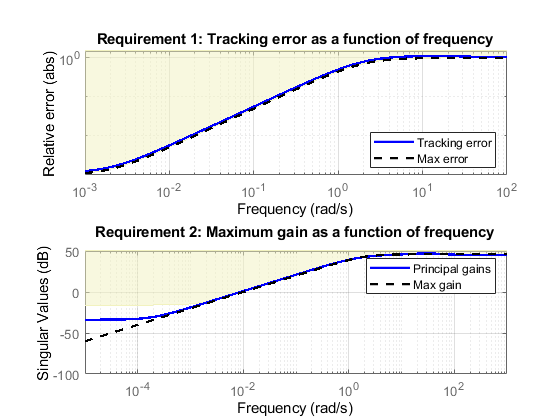
第一曲线表明调谐系统响应几乎满足跟踪要求。轻微的违规表明,设定值跟踪将靠近期望执行。
第二曲线表明除了低频之外,满足增益要求。对于此调谐目标,阴影区域表示有效调谐约束,从低频时从指定的最大增益轮廓发散。对增益配置文件的这种修改是在用于标准化目标的加权函数中避免S = 0处的杆(参见本页的提示)。虽然调谐增益超过0.001 rad / s以下的指定增益,但它仍然比峰值少于60 dB,这通常在实践中通常足够。
要进一步检查调优系统的响应,请使用getiotransfer提取相关的传递函数进行分析用时域命令如一步。
输入参数
提示
有关如何解释调优目标图的一般信息,请参见可视化调整目标。有关具体解释边际目标图的信息,请参见控制系统调优中的稳定裕度。
有关您创建的不同调整目标
改变戈尔,由生成的调优目标图viewgoal.让您在每个设计点检查调优目标。有关更多信息,请参见验证增益预定的控制系统。对于一些频域调优目标,在调优目标(虚线)中指定的增益配置文件和软件用于调优的配置文件(阴影区域)之间可能存在差异。在这种情况下,图中的阴影区域反映了软件用于调优的配置文件。你指定的增益配置文件和用于调优的增益配置文件在以下情况下可能不同:
您在离散时间内调整控制系统,但在连续时间内指定增益配置文件。
该软件修改指定增益配置文件的渐近才能提高数值稳定性。
有关强制调优目标与实际目标之间的差异的更多信息,请参见可视化调整目标。
对于MIMO反馈回路,该
LoopShape那Minloopgain.那maxloopgain.那利润率那灵敏度,拒绝目标对每个SISO环路的相对缩放敏感。Systune.在执行这些目标的同时,尝试平衡整体的循环转移矩阵。最优的环路比例存储在调整的闭环模型或SLTUNER.界面T.返回的Systune.。对于一致性,viewGoal (R, T)考虑到这种缩放,并绘制缩放开环响应或灵敏度。若要省略此刻度,请使用clearTuningInfo viewGoal (R (T))。修改
T.可能会损害存储缩放的有效性。因此,如果您对此进行了重大修改T.,建议返回来更新伸缩数据。
也可以看看
eAvgoal.|雄鸡|Systune.|systune(适用于SLTUNER)(万博1manbetxSimulink Control Design)
你也可以从以下列表中选择一个网站:
