主要内容
移动机器人算法设计
映射,路径规划,路径跟随,状态估计
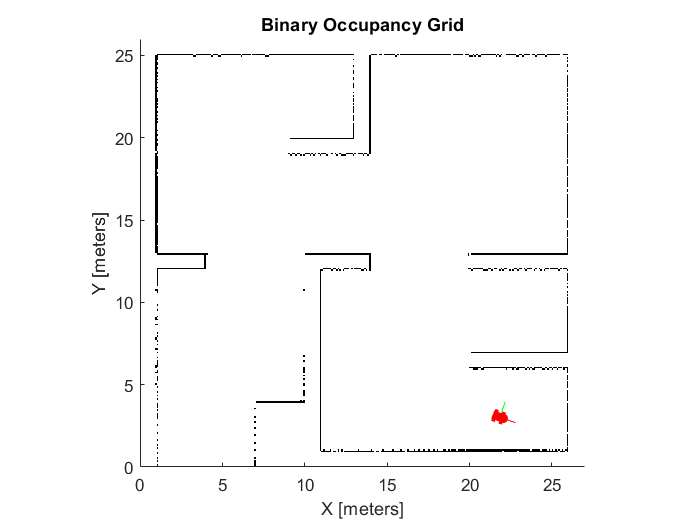
这些机器人系统的工具箱™算法专注于移动机器人或地面车辆应用。这些算法可帮助您使用整个移动机器人工作流程从映射到规划和控制。您可以使用占用网格创建环境的地图,在给定环境中开发机器人的路径规划算法,以及调整控制器遵循一组航点。根据机器人的LIDAR传感器数据执行状态估计。
职能
块
| Ackermann运动模型 | 使用Ackermann运动模型的汽车状车辆运动 |
| 自行车运动模型 | 使用自行车运动模型计算汽车样车辆运动 |
| 差分驱动运动型号 | 使用差分驱动运动型模型计算车辆运动 |
| 单轮脚踏车运动模型 | 使用单轮脚踏车运动模型计算车辆运动 |
| 纯粹的追求 | 线性和角速度控制命令 |
话题
映射和路径规划
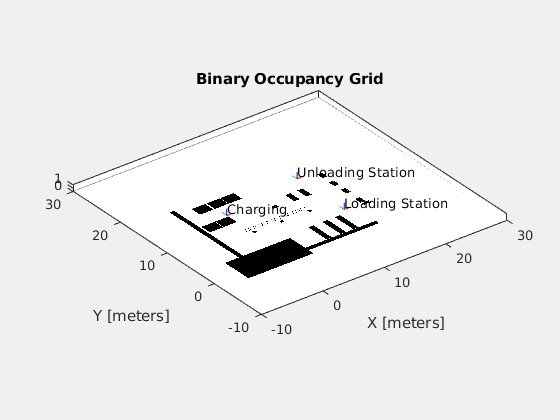
占用网格功能和地图结构的详细信息。
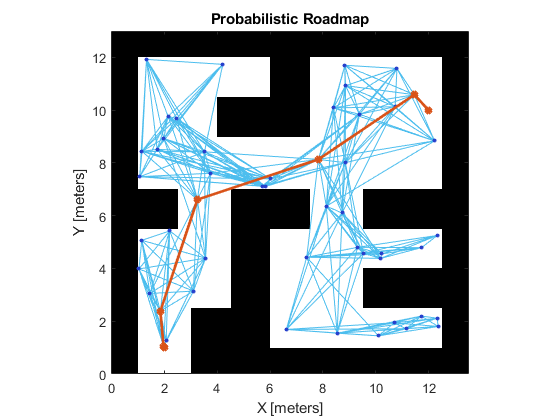
PRM算法如何工作和特定的调整参数。
此示例演示了如何使用概率路线图(PRM)路径规划器来计算给定地图上的两个位置之间的障碍路径。
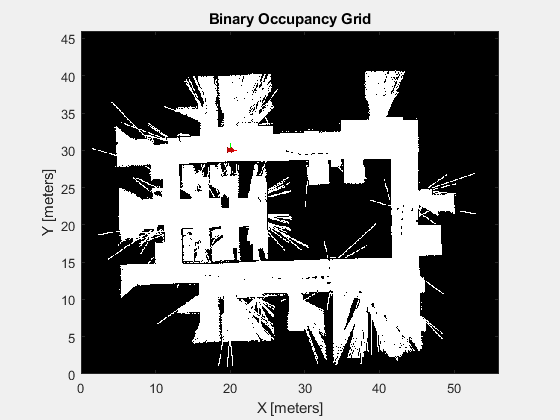
此示例显示如何使用范围传感器读取和机器人姿势为差分驱动机器人创建环境的地图。
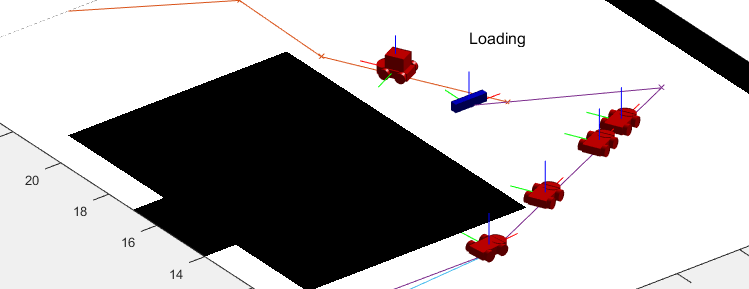
Simulink中差动驱动机器人的计划路径万博1manbetx
此示例演示了如何在Simulink®中的给定地图上执行两个位置之间的障碍路径。万博1manbetx
机器人控制
纯追求控制器功能和算法详细信息。
此示例演示如何使用机器人模拟器控制机器人遵循所需路径。
用Simulink控制凉亭中的差动驱动机器人万博1manbetx
此示例显示如何使用Simulink控制Gazebo共模中的差分驱动机器人。万博1manbetx
国家估计数
用来最终attomatorpf.粒子滤波时,必须指定粒子数、初始粒子位置和状态估计方法等参数。
粒子过滤器是递归,贝叶斯状态估计器,使用离散粒子来近似估计状态的后部分布。
粒子滤波器是一种基于采样的递归贝叶斯估计算法,其在中实现最终attomatorpf.目的。
特色例子
您还可以从以下列表中选择一个网站: