主要内容
传感器
从传感器读取数据
连接不同的传感器读取数据。
功能
主题
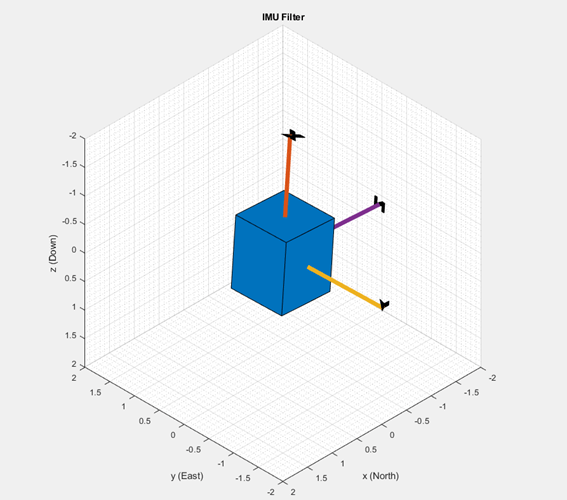
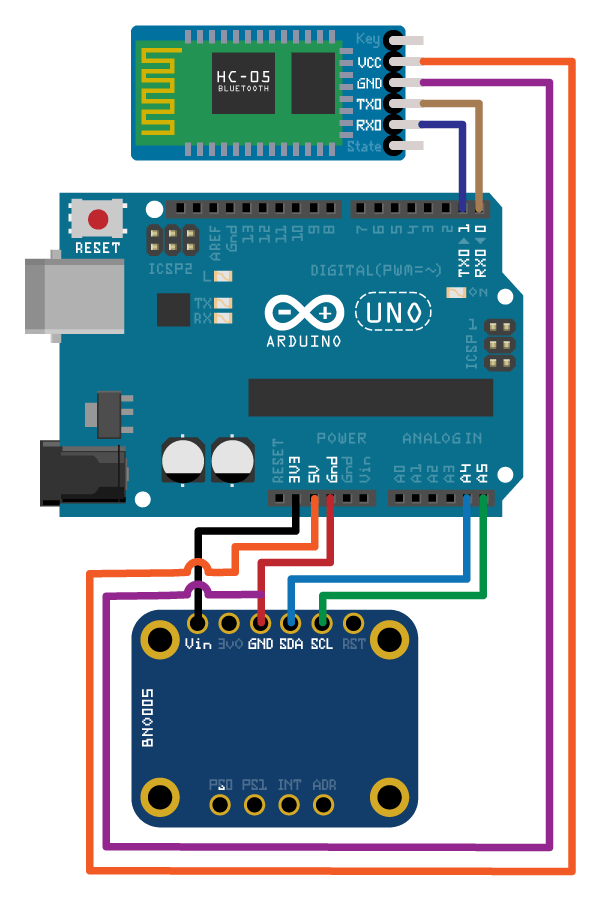
本示例演示如何从Bosch Sensortec BNO055 a 9轴绝对方位传感器实时读取和绘制校准数据。
校准BNO055传感器的步骤。
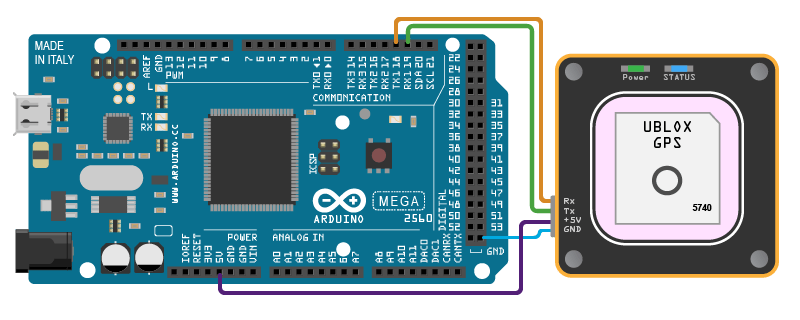
使用传感器和GPS接收器时的限制。
利用IMU传感器在Arduino上计算俯仰和横摇(万博1manbet万博1manbetxxArduino硬件Simulink支持包)
这个例子展示了如何从安装在Arduino®硬件上的IMU传感器读取加速度和角速度数据,并计算俯仰和滚动角度。
使用Nano 33 BLE Sense测量LSM9DS1传感器输出
使用蓝牙从LSM9DS1传感器读取数据®.
故障排除
解决传感器
特色的例子
您还可以从以下列表中选择网站:
